вҳһгҖҗе№Іиҙ§гҖ‘вҳһгҖҗе№Іиҙ§гҖ‘вҳһгҖҗе№Іиҙ§гҖ‘
1
еӣ дёәжңүжӢҚз…§гҖҒеҪ•еҲ¶и§Ҷйў‘гҖҒзӣҙж’ӯзӯүеҲҡйңҖпјҢзҺ°еңЁжүӢжңәзҡ„ж‘„еғҸеӨҙеҹәжң¬йғҪжҳҜй«ҳжё…пјҢж”ҜжҢҒй«ҳжё…ж‘„еғҸеӨҙзҡ„SoCйғҪж”ҜжҢҒMIPI-CSIгҖӮ
дёҚеҗҢSoCзҡ„MIPI-CSIеңЁе®һзҺ°дёҠжңүдёҖе®ҡе·®еҲ«пјҢеҚідҪҝеҗҢдёҖеҺӮ家и®ҫи®Ўз”ҹдә§зҡ„иҠҜзүҮд№ҹйғҪдёҚе°ҪзӣёеҗҢгҖӮ
жң¬ж–ҮеҹәдәҺз‘һиҠҜеҫ®rk3568е№іеҸ°evb1е…¬жқҝдёәдҫӢжқҘиҜҰз»Ҷи®Іи§ЈMIPI-CSI/DPHYй©ұеҠЁгҖӮ
йҳ…иҜ»жң¬ж–Үд№ӢеүҚпјҢе»әи®®еӨ§е®¶е…Ҳд»”з»ҶеӯҰд№ еүҚйқўеҮ зҜҮж–Үз« гҖӮ
1дёҖгҖҒrk3568硬件模еқ—йғЁеҲҶ
й©ұеҠЁзҡ„з ”з©¶еҫҖеҫҖиҰҒе…Ҳд»Һ硬件зқҖжүӢпјҢдёӢйқўжҲ‘йҰ–е…ҲзңӢдёӢrk3568е…¬жқҝз”өи·ҜгҖӮ
1пјүз”өи·Ҝеӣҫ
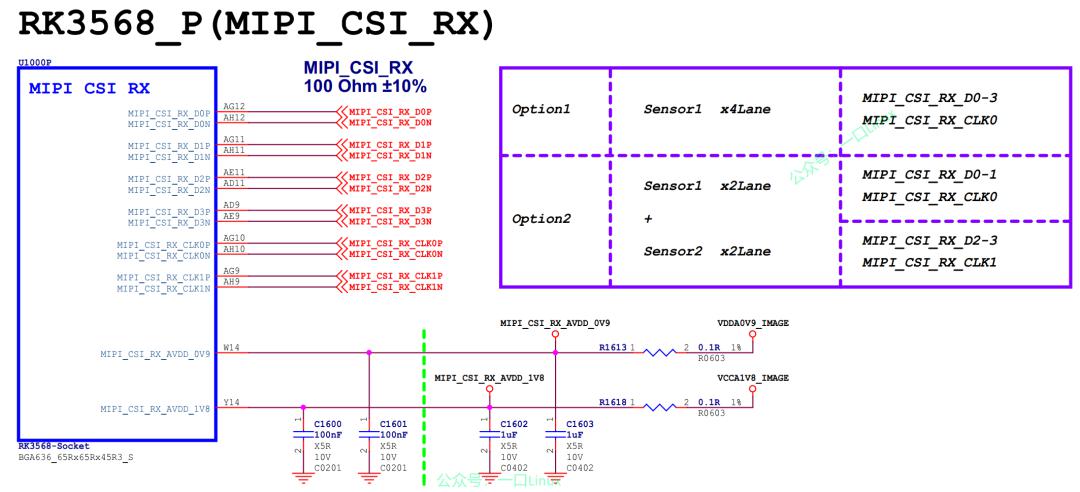
з”ұз”өи·ҜеӣҫеҸҜеҫ—ж‘„еғҸеӨҙдёҺSoCзҡ„MIPI-CSIжҺҘеҸЈпјҢеҸҜд»ҘжҳҜx4laneпјҢд№ҹеҸҜд»ҘжҳҜx2lane,dataе’ҢclkйғҪжҳҜе·®еҲҶдҝЎеҸ·гҖӮ
еҰӮжһңдёҚдәҶи§ЈпјҢе»әи®®й—®дёӢ硬件е·ҘзЁӢеёҲгҖӮ
жҺ§еҲ¶ж‘„еғҸеӨҙжҺҘеҸЈжҳҜI2CжҺҘеҸЈпјҢ并且дҪҚдәҺI2CйҖҡйҒ“4дёӢгҖӮ
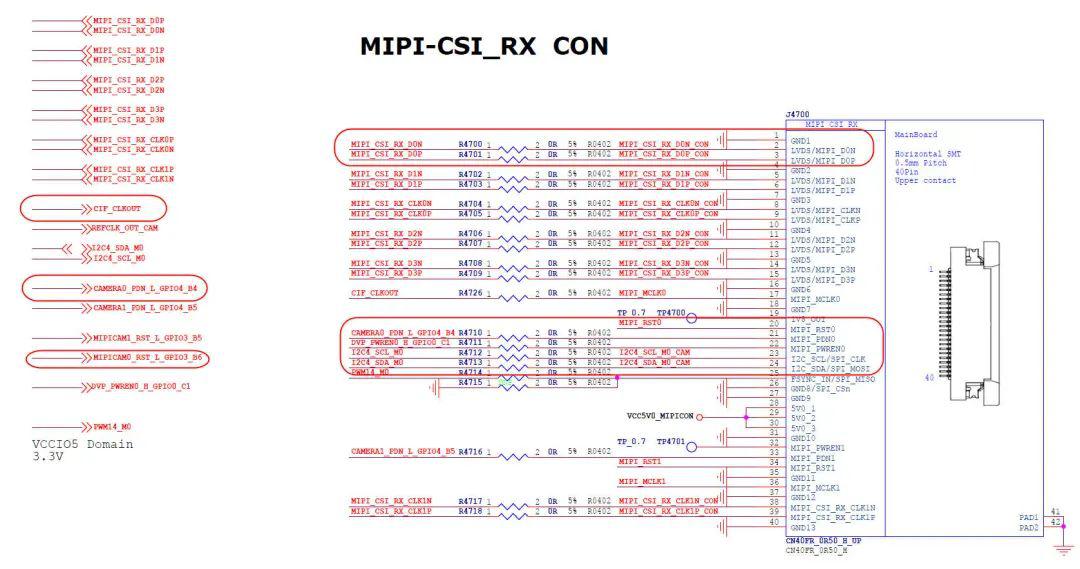
2пјүrk3568еҶ…йғЁMIPIзӣёе…іжЁЎеқ—еӣҫ
з”өи·ҜеӣҫеҸӘиғҪжҹҘзңӢSoCзҡ„MIPIжҺ§еҲ¶еҷЁдёҺж‘„еғҸеӨҙзҡ„жҺҘеҸЈе…ізі»пјҢдёӢйқўжҲ‘们жқҘзңӢдёӢrk3568еҶ…йғЁдёҺmipiзӣёе…ізҡ„жЁЎеқ—гҖӮ
еҗҗж§ҪдёҖдёӢз‘һиҠҜеҫ®зҡ„ж–ҮжЎЈпјҢдёҖиЁҖйҡҫе°ҪпјҢжҲ‘дёҘйҮҚжҖҖз–‘еҺӮ家еҺӢж №е°ұдёҚжғіи®©е…¶д»–дәәзңҹжӯЈжҗһжҮӮ他们зҡ„SDKпјҢиҝҷж ·еҘҪ收жҜҸе№ҙзҡ„жҠҖжңҜж”ҜжҢҒиҙ№з”ЁпјҢй«ҳйҖҡиҝҷжҚҹжӢӣжҳҜи®©дё«еҪ»еә•еӯҰжҳҺзҷҪдәҶгҖӮ
з”ұдәҺе®ҳж–№з»ҷзҡ„жүӢеҶҢиҰҒд№Ҳжңүй”ҷиҜҜпјҢиҰҒд№Ҳе°ұжҳҜжңүдәӣеӣҫзүҮй”ҷиҜҜпјҢе°ұдёҚжҲӘеӣҫдәҶгҖӮ
дёӢеӣҫжҳҜж №жҚ®е®ҳж–№жүӢеҶҢиҜҙжҳҺпјҢж•ҙзҗҶзҡ„еҶ…йғЁжЁЎеқ—еӣҫгҖӮ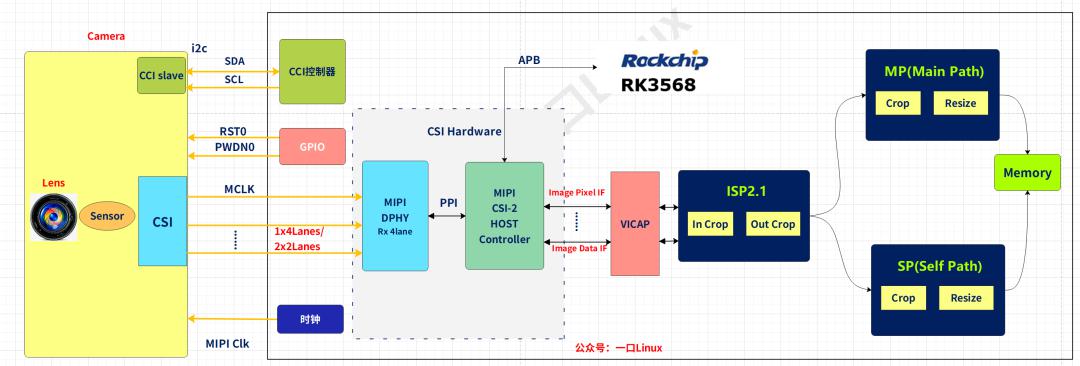
- VICAP Video CaptureйҖҡиҝҮDVP/MIPIжҺҘеҸЈд»Һж‘„еғҸеӨҙиҜ»еҸ–ж•°жҚ®пјҢ并йҖҡиҝҮAXIжҖ»зәҝе°Ҷж•°жҚ®дј иҫ“еҲ°дё»еӯҳдёӯгҖӮ
VICAPзү№жҖ§:
ж”ҜжҢҒ BT601 YCbCr 422 8bit гҖҒ RAW 8/10/12bit иҫ“е…Ҙ
ж”ҜжҢҒ BT656 YCbCr 422 8bit иҫ“е…Ҙ
ж”ҜжҢҒ BT1120 YCbCr 422 8bit иҫ“е…Ҙ , еҚ•/еҸҢиҫ№ еҸ–ж ·
ж”ҜжҢҒ 2/4 mixed BT656/BT1120 YCbCr 422 8bit input
ж”ҜжҢҒ YUYV еәҸеҲ—зҡ„й…ҚзҪ®
ж”ҜжҢҒ the polarity of pixel_clk, hsync and vsync configurable
ж”ҜжҢҒжҺҘ收 CSI2 еҚҸи®®зҡ„ж•°жҚ®(жңҖеӨҡ4дёӘIDs)
ж”ҜжҢҒжҺҘ收 DSI еҚҸи®®зҡ„ж•°жҚ®(Video mode/Command mode)
ж”ҜжҢҒзӘ—еҸЈиЈҒеүӘ
ж”ҜжҢҒvirtual stride when write to DDR
ж”ҜжҢҒиҫ“еҮәNV16/NV12ж јејҸзҡ„YUVж•°жҚ®
ж”ҜжҢҒcompact/non-compact output for RAW data
ж”ҜжҢҒMMU
- ISP(еӣҫеғҸдҝЎеҸ·еӨ„зҗҶ)
ISPжҳҜдёҖдёӘе®Ңж•ҙзҡ„и§Ҷйў‘е’ҢйқҷжӯўеӣҫеғҸиҫ“е…Ҙи®ҫеӨҮгҖӮиҝҷдёӘжЁЎеқ—ж”ҜжҢҒйӣҶжҲҗYCbCrеӨ„зҗҶеӣҫеғҸдј ж„ҹеҷЁе’Ңз®ҖеҚ•CMOSдј ж„ҹеҷЁ пјҢжҸҗдәӨжІЎжңүд»»дҪ•з»јеҗҲеӣҫеғҸеӨ„зҗҶBayer RGBжЁЎејҸеӣҫеғҸгҖӮ
rk3568йҮҮз”Ёзҡ„жҳҜISP21зүҲжң¬гҖӮ
ISP21 еҢ…еҗ«дәҶдёҖзі»еҲ—зҡ„еӣҫеғҸеӨ„зҗҶз®—жі•жЁЎеқ—пјҢдё»иҰҒеҢ…жӢ¬пјҡжҡ—з”өжөҒзҹ«жӯЈгҖҒеқҸзӮ№зҹ«жӯЈгҖҒ3AгҖҒHDRгҖҒй•ңеӨҙйҳҙеҪұзҹ« жӯЈгҖҒй•ңеӨҙз•ёеҸҳзҹ«жӯЈгҖҒ3DLUTгҖҒеҺ»еҷӘпјҲеҢ…жӢ¬RAWеҹҹеҺ»еҷӘпјҢеӨҡеё§йҷҚеҷӘпјҢйўңиүІеҺ»еҷӘзӯүпјүгҖҒй”җеҢ–зӯүгҖӮ
ISP21еҢ…жӢ¬зЎ¬д»¶з®—жі•е®һзҺ°еҸҠиҪҜ件йҖ»иҫ‘жҺ§еҲ¶йғЁеҲҶпјҢRkAiqеҚідёәиҪҜ件йҖ»иҫ‘жҺ§еҲ¶йғЁеҲҶзҡ„е®һзҺ°гҖӮ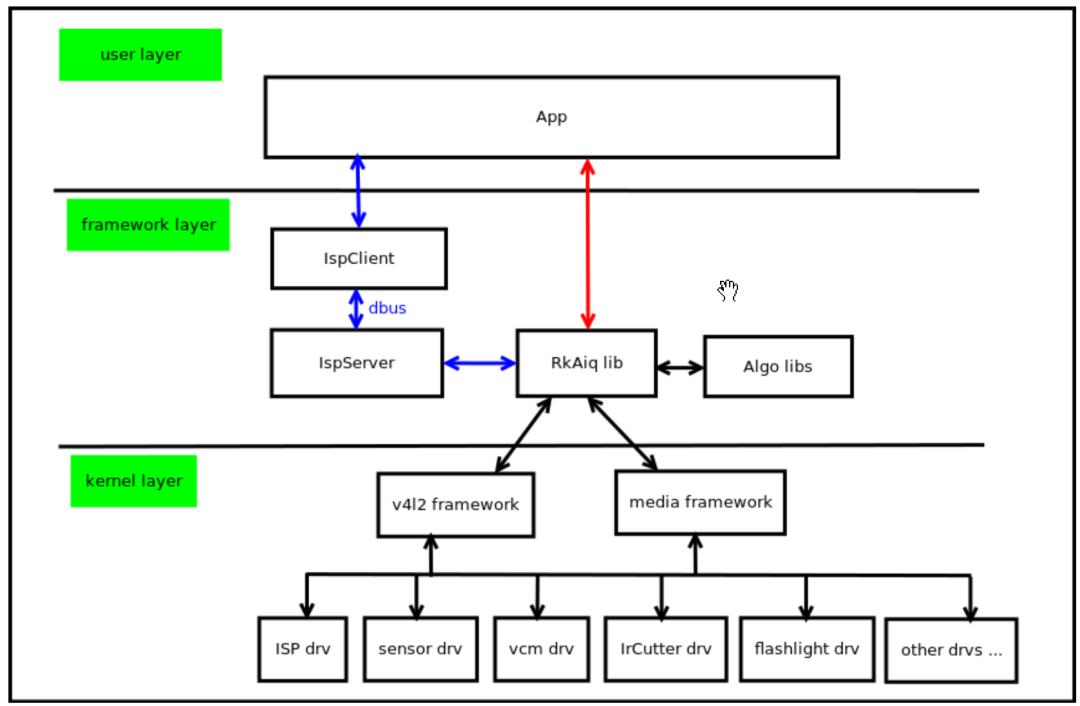
RkAiqдёҚж–ӯд»ҺISP HWиҺ·еҸ–з»ҹи®Ўж•°жҚ®пјҢ并з»ҸиҝҮ3Aзӯүз®—жі•з”ҹжҲҗж–°зҡ„еҸӮж•°еҸҚйҰҲз»ҷеҗ„硬件模еқ—гҖӮ
RkAiqиҪҜ件模еқ—дё»иҰҒе®һзҺ°зҡ„еҠҹиғҪдёәпјҡд»ҺISPй©ұеҠЁиҺ·еҸ–еӣҫеғҸз»ҹи®ЎпјҢз»“еҗҲIQ TuningеҸӮж•°пјҢдҪҝз”ЁдёҖзі»еҲ—з®—жі•и®Ў з®—еҮәж–°зҡ„ISPгҖҒSensorзӯү硬件еҸӮж•°пјҢдёҚж–ӯиҝӯд»ЈиҜҘиҝҮзЁӢпјҢжңҖз»ҲиҫҫеҲ°жңҖдјҳзҡ„еӣҫеғҸж•ҲжһңгҖӮ
3пјүCSI_RXгҖҒVICAPгҖҒISPеҜ„еӯҳеҷЁеҹәең°еқҖ
гҖҠRockchip RK3568 TRM Part1 V1.1-20210301.pdfгҖӢ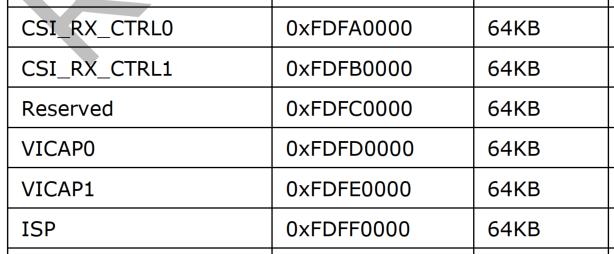

2дәҢгҖҒ з‘һиҠҜеҫ®MIPI-CSIи®ҫеӨҮж ‘еҲҶжһҗ
еңЁrk3568дёӯдё»иҰҒеҢ…еҗ«4дёӘи®ҫеӨҮпјҡ
- isp-subdevпјҡеӣҫеғҸеӨ„зҗҶжҺ§еҲ¶еҷЁпјҢеҰӮ3aеӨ„зҗҶпјҢ并е°ҶеӨ„зҗҶеҗҺзҡ„жүҖеҫ—зҡ„еҸӮж•°еҸҚйҰҲз»ҷsensorгҖӮ
- csi-subdevпјҡmipiж•°жҚ®и§ЈжһҗжҺ§еҲ¶еҷЁгҖӮ
- cis2-dphy: mipiж•°жҚ®зЎ¬д»¶жҺҘ收жҺ§еҲ¶еҷЁгҖӮ
- sensor: еӨ–жҺҘзҡ„sensorпјҢж”ҜжҢҒmipiиҫ“еҮәгҖӮ
дёӢйқўжҲ‘зңӢдёӢз‘һиҠҜеҫ®MIPI-CSIжҳҜеҰӮдҪ•з”Ёи®ҫеӨҮж ‘жҸҸиҝ°зҡ„гҖӮ
1. еҶ…ж ёдёӯзӣёе…іMIPIи®ҫеӨҮж ‘иҜҙжҳҺж–ҮжЎЈ
з‘һиҠҜеҫ®MIPI-CSIи®ҫеӨҮж ‘иҠӮзӮ№еұһжҖ§иҜҙжҳҺеҸӮиҖғеҶ…ж ёиҜҙжҳҺж–ҮжЎЈпјҡ
[kernel\Documentation\devicetree\bindings\media]
video-interfaces.txt е…ідәҺsensorиҠӮзӮ№еұһжҖ§зҡ„иҜҙжҳҺпјҢжҺҘеҸЈзұ»еһӢпјҢ
rockchip-isp1.txt ispжЁЎеқ—еұһжҖ§иҜҙжҳҺ
rockchip-mipi-dphy.txt dphyжЁЎеқ—зҡ„иҜҙжҳҺ
kernel\Documentation\devicetree\bindings\media\i2c\ovxxxxxx.txt ovзі»еҲ—зҡ„ж‘„еғҸи®ҫеӨҮж ‘иҜҙжҳҺ
2. и®ҫеӨҮж ‘иҠӮзӮ№иҜҙжҳҺ
rk3568зҡ„MIPI-CSIз”ЁеҲ°зҡ„жүҖжңүзҡ„и®ҫеӨҮж ‘иҠӮзӮ№пјҡ
a) rockchip,rkisp-vir
rkisp_vir0: rkisp-vir0 {
compatible = "rockchip,rkisp-vir";
rockchip,hw = <&rkisp>;
status = "disabled";
};
иҜҘи®ҫеӨҮж ‘дҝЎжҒҜеҜ№еә”зҡ„еҲқе§ӢеҢ–еҮҪж•°
[kernel\drivers\media\platform\rockchip\isp\dev.c]
struct platform_driver rkisp_plat_drv = {
.driver = {
.name = DRIVER_NAME,
.of_match_table = of_match_ptr(rkisp_plat_of_match),
.pm = &rkisp_plat_pm_ops,
},
.probe = rkisp_plat_probe,
.remove = rkisp_plat_remove,
};
иҜҘиҠӮзӮ№з”ЁдәҺеҲқе§ӢеҢ–ispзӣёе…ізҡ„组件пјҢ
й©ұеҠЁзЁӢеәҸдјҡеҲӣе»әжӢ“жү‘еӣҫдёӯзҡ„ rkisp-isp-subdevгҖҒrkisp-csi-subdevгҖҒrkisp_mainpathгҖҒrkisp_selfpathгҖҒrkisp_rawwr0гҖҒrkisp_rawwr2гҖҒrkisp_rawwr3гҖҒrkisp_rawrd0_mгҖҒrkisp_rawrd2_sгҖҒrkisp-statisticsгҖҒгҖҒrkisp-input-params 组件
isp硬件зӣёе…ізҡ„дҝЎжҒҜеңЁзҲ¶иҠӮзӮ№**rockchip,hw = <&rkisp>;**дёӯжҸҸиҝ°гҖӮ
b) rkisp
rkisp: rkisp@fdff0000 {
compatible = "rockchip,rk3568-rkisp";
reg = <0x0 0xfdff0000 0x0 0x10000>;
interrupts = <GIC_SPI 57 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 58 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 60 IRQ_TYPE_LEVEL_HIGH>; //дёӯж–ӯдҪҝз”Ёзҡ„gpioпјҢи§ҰеҸ‘ж–№ејҸй«ҳз”өе№іи§ҰеҸ‘
interrupt-names = "mipi_irq", "mi_irq", "isp_irq"; //дёӯж–ӯеҗҚз§°
clocks = <&cru ACLK_ISP>, <&cru HCLK_ISP>, <&cru CLK_ISP>; //ж—¶й’ҹ
clock-names = "aclk_isp", "hclk_isp", "clk_isp"; //ж—¶й’ҹеҗҚз§°
resets = <&cru SRST_ISP>, <&cru SRST_H_ISP>;
reset-names = "isp", "isp-h";
rockchip,grf = <&grf>;
power-domains = <&power RK3568_PD_VI>; //isp vicapз”өжәҗе’Ңж—¶й’ҹ
iommus = <&rkisp_mmu>; //mmuеұһжҖ§
rockchip,iq-feature = /bits/ 64 <0x3FBFFFE67FF>;
status = "disabled";
};
rkisp_mmu: iommu@fdff1a00 {
compatible = "rockchip,iommu-v2";
reg = <0x0 0xfdff1a00 0x0 0x100>;
interrupts = <GIC_SPI 59 IRQ_TYPE_LEVEL_HIGH>;
interrupt-names = "isp_mmu";
clocks = <&cru ACLK_ISP>, <&cru HCLK_ISP>;
clock-names = "aclk", "iface";
power-domains = <&power RK3568_PD_VI>;
#iommu-cells = <0>;
rockchip,disable-mmu-reset;
status = "disabled";
};
pmu: power-management@fdd90000 {
pd_vi@RK3568_PD_VI {
reg = <RK3568_PD_VI>;
clocks = <&cru HCLK_VI>,
<&cru PCLK_VI>;
pm_qos = <&qos_isp>,
<&qos_vicap0>,
<&qos_vicap1>;
};
}пјӣ
иҜҘи®ҫеӨҮж ‘иҠӮзӮ№з”ЁдәҺжҸҸиҝ°ISP硬件дҝЎжҒҜ:еҹәең°еқҖ0xfdff0000 гҖҒдёӯж–ӯжәҗгҖҒж—¶й’ҹгҖҒresetеј•и„ҡгҖҒiommusзӯүгҖӮ
й©ұеҠЁжҸҗеҸ–еҜ№еә”зҡ„硬件дҝЎжҒҜпјҢеЎ«е……еҲ°struct rkisp_hw_devз»“жһ„дҪ“еҸҳйҮҸдёӯгҖӮ
еҜ№еә”й©ұеҠЁе…ҘеҸЈпјҡ
[kernel\drivers\media\platform\rockchip\isp\hw.c]
static struct platform_driver rkisp_hw_drv = {
.driver = {
.name = "rkisp_hw",
.of_match_table = of_match_ptr(rkisp_hw_of_match),
.pm = &rkisp_hw_pm_ops,
},
.probe = rkisp_hw_probe,
.remove = rkisp_hw_remove,
.shutdown = rkisp_hw_shutdown,
};
c) CSI2еҚҸи®®зӣёе…іи®ҫеӨҮж ‘
- csi2_dphy0 жӢ“жү‘з»“жһ„зӣёе…ідҝЎжҒҜ
- csi2_dphy_hw csi2й©ұеҠЁзӣёе…ізЎ¬д»¶дҝЎжҒҜ
д»ҘдёӢжҳҜжҸҸиҝ°csi2_dphy0жӢ“жү‘дҝЎжҒҜпјҢе®һйҷ…ж‘„еғҸеӨҙдҝЎжҒҜйңҖиҰҒз”ЁжҲ·иҮӘе·ұеЎ«еҶҷ:
[rk3568-evb1-ddr4-v10.dtsi]
&csi2_dphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&0v13850_out>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidphy_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp0_in>;
};
};
};
};
иҜҘиҠӮзӮ№жҸҸиҝ°еҶ…е®№пјҡ
- зҲ¶иҠӮзӮ№csi2_dphy0
- port@n : иЎЁзӨәpadеҸ·дёәn
- mipi_in_ucam0 : Sink Pad(inиЎЁзӨәиҝӣе…ҘиҜҘentityпјҢдёҠжёёиҝһжҺҘзҡ„и®ҫеӨҮз”ұremote-endpointз»ҷеҮәпјҢеҚіж‘„еғҸеӨҙ0v13850_out)
- data-lanes : mipiйҖҡйҒ“ж•°йҮҸпјҡ4
- csidphy_out : Source Pad,дёӢжёёиҝһжҺҘзҡ„и®ҫеӨҮз”ұremote-endpointз»ҷеҮәпјҢеҚіisp0_in
д»ҘдёӢжҳҜcsi2_dphyжҺ§еҲ¶еҷЁзӣёе…ізЎ¬д»¶дҝЎжҒҜпјҢдҪҚдәҺз‘һиҠҜеҫ®3568е№іеҸ°и®ҫеӨҮж ‘ж–Ү件rk3568.dtsiдёӯ
[rk3568.dtsi]
aliases {
csi2dphy0 = &csi2_dphy0;
вҖҰвҖҰ
}
csi2_dphy0: csi2-dphy0 {
compatible = "rockchip,rk3568-csi2-dphy";
rockchip,hw = <&csi2_dphy_hw>;
status = "disabled";
};
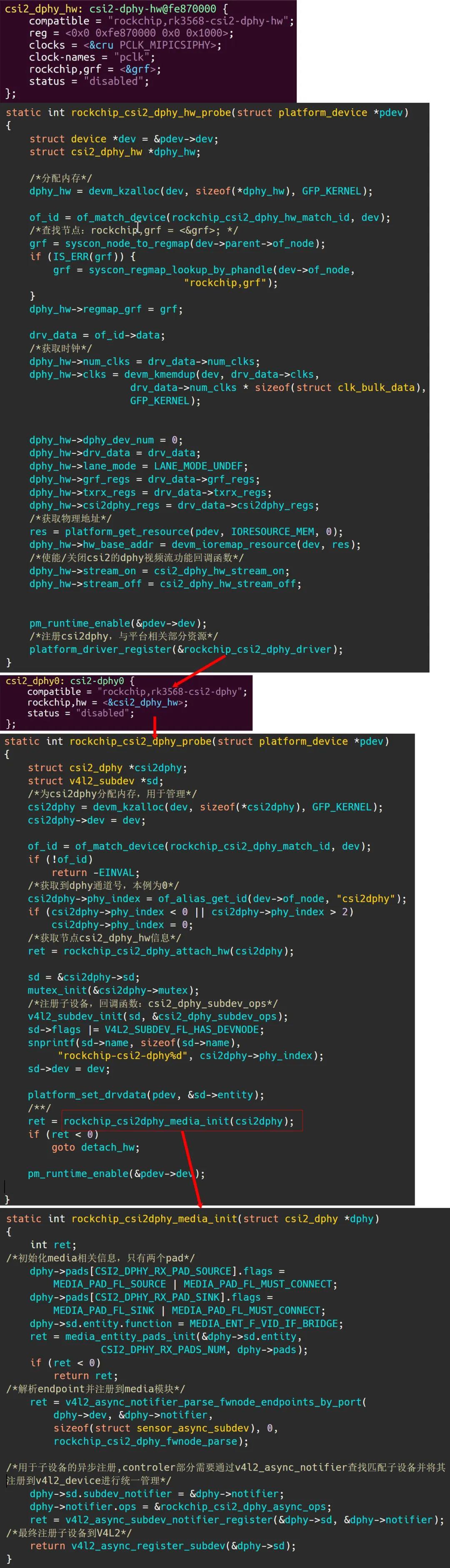
csi2_dphy_hw: csi2-dphy-hw@fe870000 {
compatible = "rockchip,rk3568-csi2-dphy-hw";
reg = <0x0 0xfe870000 0x0 0x1000>;
clocks = <&cru PCLK_MIPICSIPHY>;
clock-names = "pclk";
rockchip,grf = <&grf>;
status = "disabled";
};
csi2dphy0 еҜ№еә”зҡ„й©ұеҠЁе…ҘеҸЈдёәпјҡ
[kernel\drivers\phy\rockchip\phy-rockchip-csi2-dphy-hw.c]
static struct platform_driver rockchip_csi2_dphy_hw_driver = {
.probe = rockchip_csi2_dphy_hw_probe,
.remove = rockchip_csi2_dphy_hw_remove,
.driver = {
.name = "rockchip-csi2-dphy-hw",
.of_match_table = rockchip_csi2_dphy_hw_match_id,
},
};
еңЁеҮҪж•°rockchip_csi2_dphy_hw_probe()дёӯиҝҳдјҡжіЁеҶҢз»“жһ„дҪ“еҸҳйҮҸ rockchip_csi2_dphy_driver
630 platform_driver_register(&rockchip_csi2_dphy_driver);
rockchip_csi2_dphy_driverе®ҡд№үеҰӮдёӢпјҡ
[kernel\drivers\phy\rockchip\phy-rockchip-csi2-dphy-hw.c]
struct platform_driver rockchip_csi2_dphy_driver = {
.probe = rockchip_csi2_dphy_probe,
.remove = rockchip_csi2_dphy_remove,
.driver = {
.name = "rockchip-csi2-dphy",
.pm = &rockchip_csi2_dphy_pm_ops,
.of_match_table = rockchip_csi2_dphy_match_id,
},
};
еҲҶжһҗй©ұеҠЁе°ұиҰҒд»Һиҝҷдәӣе…ҘеҸЈеҮҪж•°probeејҖе§ӢеҲҶжһҗгҖӮ
3дёүгҖҒй©ұеҠЁеҲқе§ӢеҢ–
1. й©ұеҠЁж–Ү件зӣ®еҪ•
kernel
в”ңв”Җв”Җ arch/arm64/boot/dts/rockchip DTS й…ҚзҪ®ж–Ү件
в”ңв”Җв”Җ drivers/phy/rockchip/
в”ңв”Җв”Җ phy-rockchip-csi2-dphy.c
в””в”Җв”Җ phy-rockchip-csi2-dphy-hw.c mipi dphy й©ұеҠЁ
в”ңв”Җв”Җ drivers/media|
в”ңв”Җв”Җ platform/rockchip/isp rkisp isp й©ұеҠЁ
в”Ӯ в”ңв”Җв”Җ capture_v21.c еҢ…еҗ« mp/sp зҡ„й…ҚзҪ®еҸҠ vb2пјҢеё§дёӯж–ӯеӨ„зҗҶ
в”Ӯ в”ңв”Җв”Җ dev.c еҢ…еҗ« probeгҖҒејӮжӯҘжіЁеҶҢгҖҒ clockгҖҒ pipelineгҖҒiommu еҸҠ
media/v4l2 framework
в”Ӯ в”ңв”Җв”Җ isp_params_v21.c 3A зӣёе…іеҸӮж•°и®ҫзҪ®
в”Ӯ в”ңв”Җв”Җ isp_stats_v21.c 3A зӣёе…із»ҹи®Ў
в”Ӯ в”ңв”Җв”Җ regs.c еҜ„еӯҳеҷЁзӣёе…ізҡ„иҜ»еҶҷж“ҚдҪң
в”Ӯ в””в”Җв”Җ rkisp.c еҜ№еә” isp_sd entity иҠӮзӮ№пјҢ
в”Ӯ еҢ…еҗ«д»Һ mipi жҺҘ收数жҚ®пјҢ并жңү crop еҠҹиғҪ
в”ңв”Җв”Җ v4l2-core v4l2ж ёеҝғд»Јз Ғ
в””в”Җв”Җ i2c/
в””в”Җв”Җ ov13850.c CIS(cmos image sensor)й©ұеҠЁ
жіЁпјҡ3568зҡ„ispзүҲжң¬жҳҜv21пјҢеҸӘйңҖиҰҒзңӢv21з»“е°ҫзҡ„ж–Ү件
1. еӯ—з¬Ұи®ҫеӨҮеҸ·з”іиҜ·:videodev_init()
иҜҘеҮҪж•°дё»иҰҒз”ЁдәҺз”іиҜ·и®ҫеӨҮеҸ·пјҡ
дё»и®ҫеӨҮеҸ· пјҡ81 и®ҫеӨҮеҗҚ пјҡvideo4linux з”іиҜ·classпјҡvideo4linux
#define VIDEO_MAJOR 81
#define VIDEO_NUM_DEVICES 256
#define VIDEO_NAME "video4linux"
static struct class video_class = {
.name = VIDEO_NAME,
.dev_groups = video_device_groups,
};
static int __init videodev_init(void)
{
dev_t dev = MKDEV(VIDEO_MAJOR, 0);
ret = register_chrdev_region(dev, VIDEO_NUM_DEVICES, VIDEO_NAME);
ret = class_register(&video_class);
}
static void __exit videodev_exit(void)
{
dev_t dev = MKDEV(VIDEO_MAJOR, 0);
class_unregister(&video_class);
unregister_chrdev_region(dev, VIDEO_NUM_DEVICES);
}
жіЁж„Ҹ дёәз®ҖеҢ–иө·и§ҒпјҢжүҖжңүд»Јз ҒеҸӘжҠҠжңҖйҮҚиҰҒзҡ„йғЁеҲҶеҲ—дёҫеҮәжқҘпјҢеҗҺеҗҢгҖӮ
2. ispжһ¶жһ„еҲқе§ӢеҢ–:rkisp_plat_probe()
иҜҘеҮҪж•°жҳҜжңҖйҮҚиҰҒзҡ„дёҖдёӘеҲқе§ӢеҢ–еҮҪж•°пјҢйҷӨдәҶrkisp_csi2_dphy(entity67)еӨ–пјҢе…¶д»–зҡ„еҠҹиғҪйғЁд»¶йғҪеңЁиҜҘеҮҪж•°дёӯеҲқе§ӢеҢ–гҖӮ
жіЁеҶҢrkisp-vir0зҲ¶и®ҫеӨҮгҖҒisp-dubdevеӯҗи®ҫеӨҮгҖҒcsi2-devеӯҗи®ҫеӨҮзӯүпјҢз”ұдәҺrk3568ж”ҜжҢҒеӨҡи·Ҝsensorиҫ“е…ҘпјҢеҚіispж”ҜжҢҒеӨҡи·ҜеӨ„зҗҶпјҢеӣ жӯӨдјҡиҷҡжӢҹеӨҡйҖҡйҒ“isp-virxгҖӮ
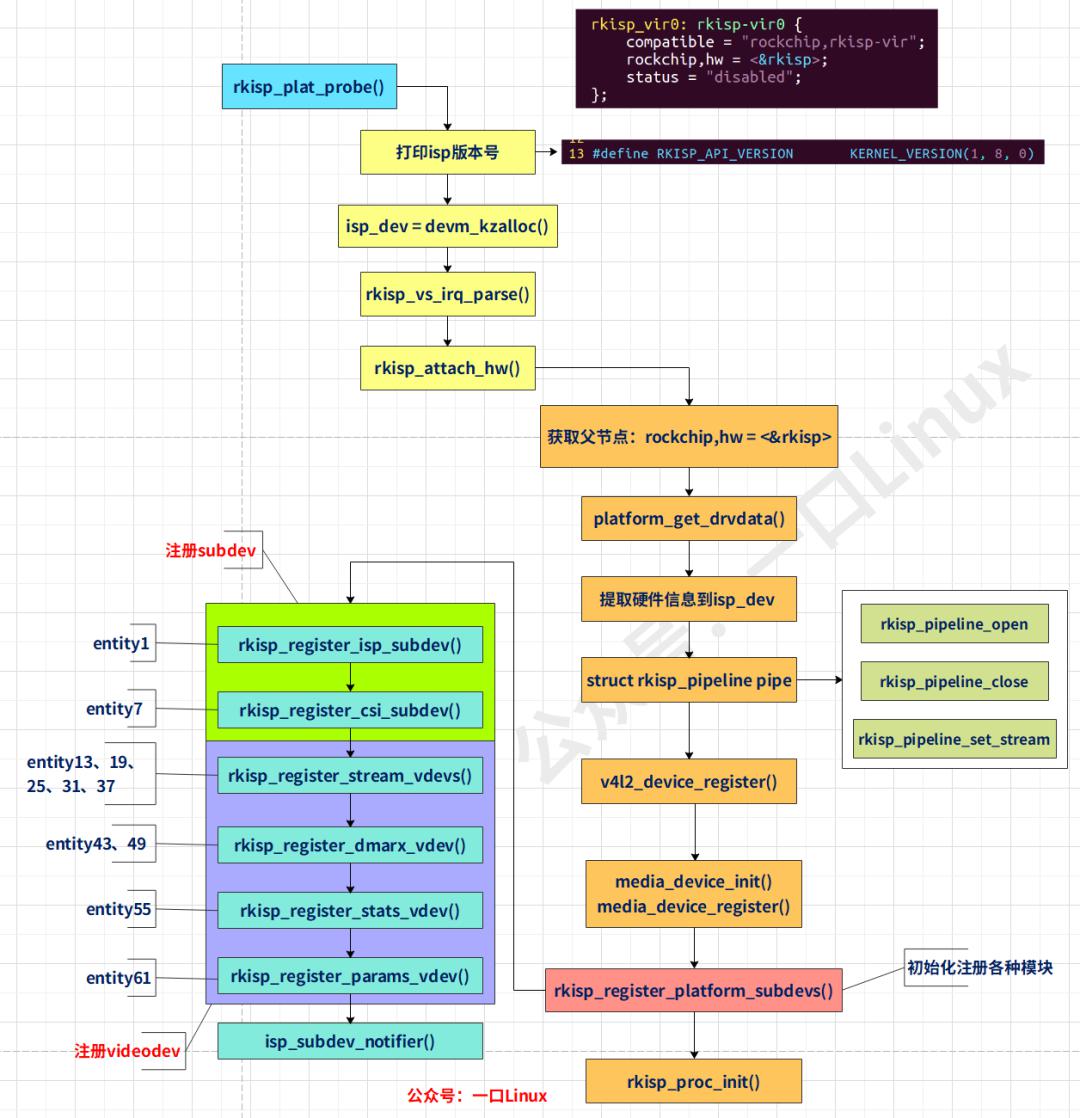
иҜҘеҮҪж•°дё»иҰҒе·ҘдҪңпјҡ

иҝҷдәӣеӣһи°ғеҮҪж•°еңЁжһ¶жһ„дёӯе…ізі»еҸӮиҖғдёӢеӣҫпјҡ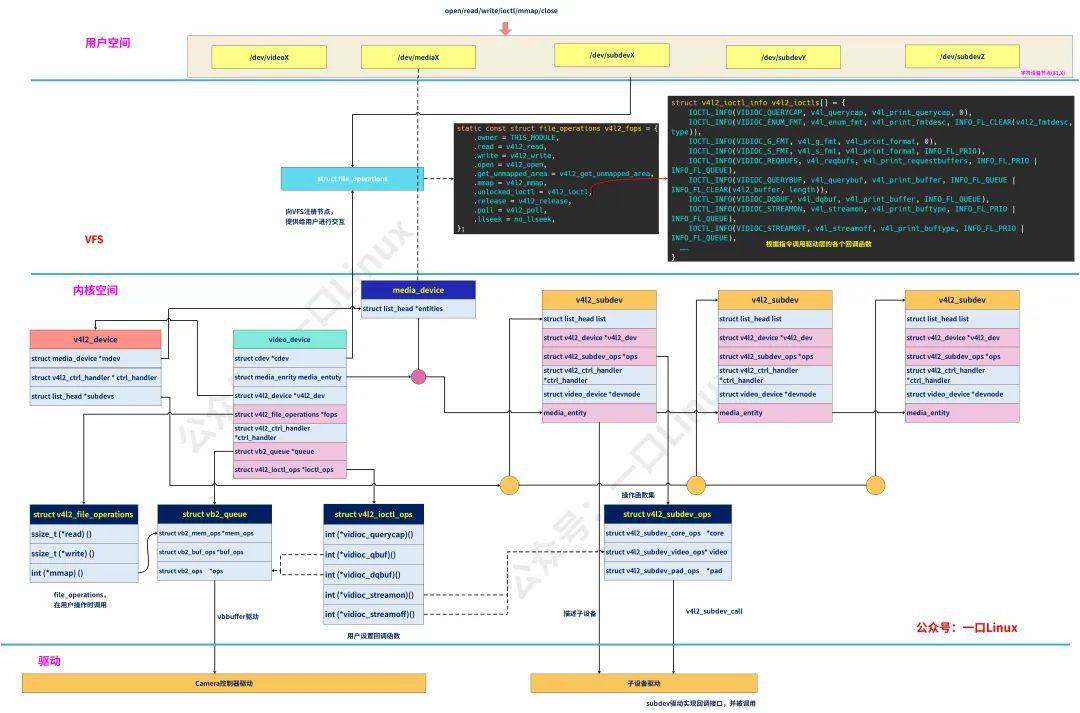 е…¶дёӯentity67зӣёе…іиө„жәҗжҳҜеңЁеҮҪж•°rockchip_csi2_dphy_probe()дёӯжіЁеҶҢгҖӮ
е…¶дёӯentity67зӣёе…іиө„жәҗжҳҜеңЁеҮҪж•°rockchip_csi2_dphy_probe()дёӯжіЁеҶҢгҖӮ
3. ispй©ұеҠЁеҲқе§ӢеҢ–пјҡrkisp_hw_probe()
иҜҘеҮҪж•°дё»иҰҒеҲқе§ӢеҢ–ispй©ұеҠЁ
static const struct of_device_id rkisp_hw_of_match[] = {
вҖҰвҖҰ
{
.compatible = "rockchip,rk3568-rkisp",
.data = &rk3568_isp_match_data,
},
{},
};
640 static int rkisp_hw_probe(struct platform_device *pdev)
641 {
646 struct rkisp_hw_dev *hw_dev;
вҖҰвҖҰ
/*еҢ№й…Қи®ҫеӨҮж ‘compatibleеұһжҖ§*/
651 match = of_match_node(rkisp_hw_of_match, node);
654 /*дёәhw_dev еҲҶй…ҚеҶ…еӯҳ*/
655 hw_dev = devm_kzalloc(dev, sizeof(*hw_dev), GFP_KERNEL);
659 dev_set_drvdata(dev, hw_dev);//dev->driver_data
660 hw_dev->dev = dev;
661 hw_dev->is_thunderboot = IS_ENABLED(CONFIG_VIDEO_ROCKCHIP_THUNDER_BOOT_ISP);
662 dev_info(dev, "is_thunderboot: %d\n", hw_dev->is_thunderboot);
663 hw_dev->max_in.w = 0;
664 hw_dev->max_in.h = 0;
665 hw_dev->max_in.fps = 0;
//иҺ·еҫ—grfеҸҘжҹ„*/
669 hw_dev->grf = syscon_regmap_lookup_by_phandle(node, "rockchip,grf");
672 /*иҺ·еҸ–жҺ§еҲ¶еҷЁзү©зҗҶең°еқҖ
673 res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
/*е°Ҷзү©зҗҶең°еқҖжҳ е°„дёәеҹәең°еқҖ*/
679 hw_dev->base_addr = devm_ioremap_resource(dev, res);
694 match_data = match->data;
695 hw_dev->mipi_irq = -1;
696
697 hw_dev->pdev = pdev;
698 hw_dev->match_data = match_data;
699 if (!hw_dev->is_thunderboot)
700 rkisp_register_irq(hw_dev); //жіЁеҶҢдёӯж–ӯ
701 /*д»Һи®ҫеӨҮж ‘дёӯжҸҗеҸ–ж—¶й’ҹ*/
702 for (i = 0; i < match_data->num_clks; i++) {
703 struct clk *clk = devm_clk_get(dev, match_data->clks[i]);
704
707 hw_dev->clks[i] = clk;
708 }
709 hw_dev->num_clks = match_data->num_clks;
710 hw_dev->clk_rate_tbl = match_data->clk_rate_tbl;
711 hw_dev->num_clk_rate_tbl = match_data->num_clk_rate_tbl;
712 /*жҸҗеҸ–resetеұһжҖ§*/
713 hw_dev->reset = devm_reset_control_array_get(dev, false, false);
718
719 ret = of_property_read_u64(node, "rockchip,iq-feature", &hw_dev->iq_feature);
720 if (!ret)
721 hw_dev->is_feature_on = true;
722 else
723 hw_dev->is_feature_on = false;
724 /*еҲқе§ӢеҢ–е…¶д»–зҡ„дёҖдәӣеҸҳйҮҸ*/
725 hw_dev->dev_num = 0;
вҖҰвҖҰвҖҰвҖҰ
743 hw_dev->is_shutdown = false;
744 hw_dev->is_mmu = is_iommu_enable(dev);
745 ret = of_reserved_mem_device_init(dev);
вҖҰвҖҰвҖҰвҖҰ
770 }
4. mipiжҺҘеҸЈdphyй©ұеҠЁеҲқе§ӢеҢ–пјҡrockchip_csi2_dphy_probe()гҖҒrockchip_csi2_dphy_hw_probe()
ж–Үдёӯеҗ„з§ҚmipiжҠҖжңҜж–ҮжЎЈпјҢеҗҺеҸ°еӣһеӨҚе…ій”®еӯ—пјҡmipi
еҗҺйқўиҝҳдјҡ继з»ӯжӣҙж–°еҮ зҜҮCameraж–Үз« пјҢ
е»әи®®еӨ§е®¶и®ўйҳ…жң¬дё“йўҳпјҒ
д№ҹеҸҜд»ҘеҗҺеҸ°з•ҷиЁҖпјҢеҠ дёҖеҸЈеҗӣеҘҪеҸӢyikoupengпјҢ
жӢүдҪ иҝӣй«ҳиҙЁйҮҸжҠҖжңҜдәӨжөҒзҫӨгҖӮ
end
дёҖеҸЈLinux
е…іжіЁпјҢеӣһеӨҚгҖҗ1024гҖ‘жө·йҮҸLinuxиө„ж–ҷиө йҖҒ
зІҫеҪ©ж–Үз« еҗҲйӣҶ
ж–Үз« жҺЁиҚҗ
вҳһгҖҗдё“иҫ‘гҖ‘вҳһгҖҗдё“иҫ‘гҖ‘вҳһгҖҗдё“иҫ‘гҖ‘е…Ҙй—ЁвҳһгҖҗдё“иҫ‘гҖ‘вҳһгҖҗдё“иҫ‘гҖ‘вҳһгҖҗе№Іиҙ§гҖ‘вҳһгҖҗе№Іиҙ§гҖ‘