ÔåôµÄ¿ÞìÉÕà│µ│¿Ôåô
Þ¢¼Þ笴╝Üþ¢æþ╗£
þëêµØâÕ¢ÆÕăõ¢£ÞÇàµëǵ£ë´╝îժ鵣ëõ¥ÁµØâ´╝îÞ»ÀÞüöþ│╗ÕêáÚÖñÒÇé
õ©ÇÒÇüÕ碵ò░µîçÚÆêÕ£¿Þ«▓Õø×Þ░âÕ碵ò░õ╣ïÕëì´╝îµêæõ╗¼Ú£ÇÞªüõ║åÞºúÕ碵ò░µîçÚÆêÒÇé
µêæõ╗¼Úâ¢þƒÑÚüô´╝îCÞ»¡Þ¿ÇþÜäþüÁÚ¡éµÿ»µîçÚÆê´╝îµêæõ╗¼þ╗ÅÕ©©õ¢┐þö¿µò┤Õ×ïµîçÚÆê´╝îÕ¡ùþ¼ªõ©▓µîçÚÆê´╝îþ╗ôµ×äõ¢ôµîçÚÆêþ¡ëÒÇé
int *p1;
char *p2;
STRUCT *p3; // STRUCTõ©║µêæõ╗¼Õ«Üõ╣ëþÜäþ╗ôµ×äõ¢ôõ¢åµÿ»ÕÑ¢Õâŵêæõ╗¼õ©ÇÞê¼Õ¥êÕ░æõ¢┐þö¿Õ碵ò░µîçÚÆê´╝îµêæõ╗¼õ©ÇÞê¼õ¢┐þö¿Õ碵ò░Ú⢵ÿ»þø┤µÄÑõ¢┐þö¿Õ碵ò░Þ░âþö¿ÒÇé
õ©ïÚØóµêæõ╗¼µØÑõ║åÞºúõ©Çõ©ïÕ碵ò░µîçÚÆêþÜ䵪éÕ┐ÁÕÆîõ¢┐þö¿µû╣µ│òÒÇé
1. µªéÕ┐Á
Õ碵ò░µîçÚÆêµÿ»µîçÕÉæÕ碵ò░þÜäµîçÚÆêÕÅÿÚçÅÒÇé
ÚÇÜÕ©©µêæõ╗¼Þ»┤þÜäµîçÚÆêÕÅÿÚçŵÿ»µîçÕÉæõ©Çõ©¬µò┤Õ×ïÒÇüÕ¡ùþ¼ªÕ×ïµêûµò░þ╗äþ¡ëÕÅÿÚçÅ´╝îÞÇîÕ碵ò░µîçÚÆêµÿ»µîçÕÉæÕ碵ò░ÒÇé
Õ碵ò░µîçÚÆêÕÅ»õ╗ÑÕâÅõ©ÇÞê¼Õ碵ò░õ©ÇµáÀ´╝îþö¿õ║ÄÞ░âþö¿Õ碵ò░ÒÇüõ╝áÚÇÆÕÅéµò░ÒÇé
Õ碵ò░µîçÚÆêþÜäÕ«Üõ╣ëµû╣Õ╝Åõ©║´╝Ü
Õ碵ò░Þ┐öÕø×ÕÇ╝þ▒╗Õ×ï (* µîçÚÆêÕÅÿÚçÅÕÉì) (Õ碵ò░ÕÅéµò░ÕêùÞí¿);ÔÇ£Õ碵ò░Þ┐öÕø×ÕÇ╝þ▒╗Õ×ïÔÇØÞí¿þñ║޻ѵîçÚÆêÕÅÿÚçÅÕÅ»õ╗ѵîçÕÉæÕàÀµ£ëõ╗Çõ╣êÞ┐öÕø×ÕÇ╝þ▒╗Õ×ïþÜäÕ碵ò░´╝øÔÇ£Õ碵ò░ÕÅéµò░ÕêùÞí¿ÔÇØÞí¿þñ║޻ѵîçÚÆêÕÅÿÚçÅÕÅ»õ╗ѵîçÕÉæÕàÀµ£ëõ╗Çõ╣êÕÅéµò░ÕêùÞí¿þÜäÕ碵ò░ÒÇéÞ┐Öõ©¬ÕÅéµò░ÕêùÞí¿õ©¡ÕŬڣÇÞªüÕåÖÕ碵ò░þÜäÕÅéµò░þ▒╗Õ×ïÕì│ÕÅ»ÒÇé
µêæõ╗¼þ£ïÕê░´╝îÕ碵ò░µîçÚÆêþÜäÕ«Üõ╣ëÕ░▒µÿ»Õ░åÔÇ£Õ碵ò░Õú░µÿÄÔÇØõ©¡þÜäÔÇ£Õ碵ò░ÕÉìÔÇصö╣µêÉÔÇ£´╝êµîçÚÆêÕÅÿÚçÅÕÉì´╝ëÔÇØÒÇéõ¢åµÿ»Þ┐ÖÚçîÚ£ÇÞªüµ│¿µäÅþÜäµÿ»´╝ÜÔÇ£´╝êµîçÚÆêÕÅÿÚçÅÕÉì´╝ëÔÇØõ©ñþ½»þÜäµï¼ÕÅÀõ©ìÞâ¢þ£üþòÑ´╝îµï¼ÕÅÀµö╣ÕÅÿõ║åÞ┐Éþ«ùþ¼ªþÜäõ╝ÿÕàêþ║ºÒÇéÕªéµ×£þ£üþòÑõ║åµï¼ÕÅÀ´╝îÕ░▒õ©ìµÿ»Õ«Üõ╣ëÕ碵ò░µîçÚÆêÞÇîµÿ»õ©Çõ©¬Õ碵ò░Õú░µÿÄõ║å´╝îÕì│Õú░µÿÄõ║åõ©Çõ©¬Þ┐öÕø×ÕÇ╝þ▒╗Õ×ïõ©║µîçÚÆêÕ×ïþÜäÕ碵ò░ÒÇé
Úéúõ╣êµÇÄõ╣êÕêñµû¡õ©Çõ©¬µîçÚÆêÕÅÿÚçŵÿ»µîçÕÉæÕÅÿÚçÅþÜäµîçÚÆêÕÅÿÚçÅÞ┐ÿµÿ»µîçÕÉæÕ碵ò░þÜäµîçÚÆêÕÅÿÚçÅÕæó´╝ƒÚªûÕàêþ£ïÕÅÿÚçÅÕÉìÕëìÚØóµ£ëµ▓íµ£ëÔÇ£ÔÇØ´╝îÕªéµ×£µ£ëÔÇ£ÔÇØÞ»┤µÿĵÿ»µîçÚÆêÕÅÿÚçÅ´╝øÕർíþ£ïÕÅÿÚçÅÕÉìþÜäÕÉÄÚØóµ£ëµ▓íµ£ëÕ©ªµ£ëÕ¢óÕÅéþ▒╗Õ×ïþÜäÕ£åµï¼ÕÅÀ´╝îÕªéµ×£µ£ëÕ░▒µÿ»µîçÕÉæÕ碵ò░þÜäµîçÚÆêÕÅÿÚçÅ´╝îÕì│Õ碵ò░µîçÚÆê´╝îÕªéµ×£µ▓íµ£ëÕ░▒µÿ»µîçÕÉæÕÅÿÚçÅþÜäµîçÚÆêÕÅÿÚçÅÒÇé
µ£ÇÕÉÄÚ£ÇÞªüµ│¿µäÅþÜäµÿ»´╝îµîçÕÉæÕ碵ò░þÜäµîçÚÆêÕÅÿÚçŵ▓íµ£ë ++ ÕÆî ÔÇô Þ┐Éþ«ùÒÇé
õ©ÇÞê¼õ©║õ║åµû╣õ¥┐õ¢┐þö¿´╝îµêæõ╗¼õ╝ÜÚÇëµï®´╝Ü
typedef Õ碵ò░Þ┐öÕø×ÕÇ╝þ▒╗Õ×ï (* µîçÚÆêÕÅÿÚçÅÕÉì) (Õ碵ò░ÕÅéµò░ÕêùÞí¿);µ»öÕªé´╝Ü
typedef int (*Fun1)(int); //Õú░µÿÄõ╣ƒÕÅ»ÕåÖµêÉint (*Fun1)(int x)´╝îõ¢åõ╣áµâ»õ©èõ©ÇÞê¼õ©ìÞ┐ÖµáÀÒÇé
typedef int (*Fun2)(int, int); //ÕÅéµò░õ©║õ©ñõ©¬µò┤Õ×ï´╝îÞ┐öÕø×ÕÇ╝õ©║µò┤Õ×ï
typedef void (*Fun3)(void); //µùáÕÅéµò░ÕÆîÞ┐öÕø×ÕÇ╝
typedef void* (*Fun4)(void*); //ÕÅéµò░ÕÆîÞ┐öÕø×ÕÇ╝Úâ¢õ©║void*µîçÚÆê2. Õªéõ¢òþö¿Õ碵ò░µîçÚÆêÞ░âþö¿Õ碵ò░
þ╗ÖÕñºÕ«Âõ©¥õ©Çõ©¬õ¥ïÕ¡É´╝Ü
int Func(int x); /*Õú░µÿÄõ©Çõ©¬Õ碵ò░*/
int (*p) (int x); /*Õ«Üõ╣ëõ©Çõ©¬Õ碵ò░µîçÚÆê*/
p = Func; /*Õ░åFuncÕ碵ò░þÜäÚªûÕ£░ÕØÇÞÁïþ╗ÖµîçÚÆêÕÅÿÚçÅp*/
p = &Func; /*Õ░åFuncÕ碵ò░þÜäÚªûÕ£░ÕØÇÞÁïþ╗ÖµîçÚÆêÕÅÿÚçÅp*/ÞÁïÕÇ╝µùÂÕ碵ò░ Func õ©ìÕ©ªµï¼ÕÅÀ´╝îõ╣ƒõ©ìÕ©ªÕÅéµò░ÒÇéþö▒õ║ÄÕ碵ò░ÕÉì Func õ╗úÞí¿Õ碵ò░þÜäÚªûÕ£░ÕØÇ´╝îÕøᵡñþ╗ÅÞ┐çÞÁïÕÇ╝õ╗ÑÕÉÄ´╝îµîçÚÆêÕÅÿÚçÅ p Õ░▒µîçÕÉæÕ碵ò░ Func() õ╗úþáüþÜäÚªûÕ£░ÕØÇõ║åÒÇé
õ©ïÚØóµØÑÕåÖõ©Çõ©¬þ¿ïÕ║Å´╝îþ£ïõ║åÞ┐Öõ©¬þ¿ïÕ║Åõ¢áõ╗¼Õ░▒µÿÄþÖ¢Õ碵ò░µîçÚÆêµÇÄõ╣êõ¢┐þö¿õ║å´╝Ü
#include <stdio.h>
int Max(int, int); //Õ碵ò░Õú░µÿÄ
int main(void)
{
int(*p)(int, int); //Õ«Üõ╣ëõ©Çõ©¬Õ碵ò░µîçÚÆê
int a, b, c;
p = Max; //µèèÕ碵ò░MaxÞÁïþ╗ÖµîçÚÆêÕÅÿÚçÅp, õ¢┐pµîçÕÉæMaxÕ碵ò░
printf("please enter a and b:");
scanf("%d%d", &a, &b);
c = (*p)(a, b); //ÚÇÜÞ┐çÕ碵ò░µîçÚÆêÞ░âþö¿MaxÕ碵ò░
printf("a = %d\nb = %d\nmax = %d\n", a, b, c);
return 0;
}
int Max(int x, int y) //Õ«Üõ╣ëMaxÕ碵ò░
{
int z;
if (x > y)
{
z = x;
}
else
{
z = y;
}
return z;
}þë╣Õê½µ│¿µäÅþÜäµÿ»´╝îÕøáõ©║Õ碵ò░ÕÉìµ£¼Þ║½Õ░▒ÕÅ»õ╗ÑÞí¿þñ║Þ»ÑÕ碵ò░Õ£░ÕØÇ´╝êµîçÚÆê´╝ë´╝îÕøᵡñÕ£¿ÞÄÀÕÅûÕ碵ò░µîçÚÆêµù´╝îÕÅ»õ╗Ñþø┤µÄÑþö¿Õ碵ò░ÕÉì´╝îõ╣ƒÕÅ»õ╗ÑÕÅûÕ碵ò░þÜäÕ£░ÕØÇÒÇé
p = MaxÕÅ»õ╗ѵö╣µêÉ p = &Max
c = (*p)(a, b) ÕÅ»õ╗ѵö╣µêÉ c = p(a, b)3. Õ碵ò░µîçÚÆêõ¢£õ©║µƒÉõ©¬Õ碵ò░þÜäÕÅéµò░
µùóþäÂÕ碵ò░µîçÚÆêÕÅÿÚçŵÿ»õ©Çõ©¬ÕÅÿÚçÅ´╝îÕ¢ôþäÂõ╣ƒÕÅ»õ╗Ñõ¢£õ©║µƒÉõ©¬Õ碵ò░þÜäÕÅéµò░µØÑõ¢┐þö¿þÜäÒÇéþñ║õ¥ï´╝Ü
#include <stdio.h>
#include <stdlib.h>
typedef void(*FunType)(int);
//ÕëìÕèáõ©Çõ©¬typedefÕà│Úö«Õ¡ù´╝îÞ┐ÖµáÀÕ░▒Õ«Üõ╣ëõ©Çõ©¬ÕÉìõ©║FunTypeÕ碵ò░µîçÚÆêþ▒╗Õ×ï´╝îÞÇîõ©ìµÿ»õ©Çõ©¬FunTypeÕÅÿÚçÅÒÇé
//Õ¢óÕ╝ÅÕÉî typedef int* PINT;
void myFun(int x);
void hisFun(int x);
void herFun(int x);
void callFun(FunType fp,int x);
int main()
{
callFun(myFun,100);//õ╝áÕàÑÕ碵ò░µîçÚÆêÕ©©ÚçÅ´╝îõ¢£õ©║Õø×Þ░âÕ碵ò░
callFun(hisFun,200);
callFun(herFun,300);
return 0;
}
void callFun(FunType fp,int x)
{
fp(x);//ÚÇÜÞ┐çfpþÜäµîçÚÆêµëºÞíîõ╝áÚÇÆÞ┐øµØÑþÜäÕ碵ò░´╝îµ│¿µäÅfpµëǵîçþÜäÕ碵ò░µ£ëõ©Çõ©¬ÕÅéµò░
}
void myFun(int x)
{
printf("myFun: %d\n",x);
}
void hisFun(int x)
{
printf("hisFun: %d\n",x);
}
void herFun(int x)
{
printf("herFun: %d\n",x);
}
4. Õ碵ò░µîçÚÆêõ¢£õ©║Õ碵ò░Þ┐öÕø×þ▒╗Õ×ï
µ£ëõ║åõ©èÚØóþÜäÕƒ║þíÇ´╝îÞªüÕåÖÕç║Þ┐öÕø×þ▒╗Õ×ïõ©║Õ碵ò░µîçÚÆêþÜäÕ碵ò░Õ║öÞ»Ñõ©ìÚÜ¥õ║å´╝îõ©ïÚØóÞ┐Öõ©¬õ¥ïÕ¡ÉÕ░▒µÿ»Þ┐öÕø×þ▒╗Õ×ïõ©║Õ碵ò░µîçÚÆêþÜäÕ碵ò░´╝Ü
void (* func5(int, int, float ))(int, int)
{
...
}func5 õ╗Ñ (int, int, float) õ©║ÕÅéµò░´╝îÕàÂÞ┐öÕø×þ▒╗Õ×ïõ©║ void (\*)(int, int) ÒÇéÕ£¿CÞ»¡Þ¿Çõ©¡´╝îÕÅÿÚçŵêûÞÇàÕ碵ò░þÜäÕú░µÿÄõ╣ƒµÿ»õ©Çõ©¬ÕñºÕ¡ªÚù«´╝îµâ│Þªüõ║åÞºúµø┤ÕñÜÕà│õ║ÄÕú░µÿÄþÜäÞ»ØÚóÿ´╝îÕÅ»õ╗ÑÕÅéÞÇâµêæõ╣ïÕëìþÜäµûçþ½á - Cõ©ôÕ«Âþ╝ûþ¿ïÒÇïÞ»╗õ╣ªþ¼öÞ«░(1-3þ½á)ÒÇéÞ┐Öµ£¼õ╣ªþÜäþ¼¼õ©ëþ½áÞè▒õ║åµò┤µò┤õ©Çþ½áþÜäÕåàÕ«╣µØÑÞ«▓ÞºúÕªéõ¢òÞ»╗µçéCÞ»¡Þ¿ÇþÜäÕú░µÿÄÒÇé5. Õ碵ò░µîçÚÆêµò░þ╗ä
Õ£¿Õ╝ÇÕºïÞ«▓ÞºúÕø×Þ░âÕ碵ò░Õëì´╝îµ£ÇÕÉÄõ╗ïþ╗ìõ©Çõ©ïÕ碵ò░µîçÚÆêµò░þ╗äÒÇéµùóþäÂÕ碵ò░µîçÚÆêõ╣ƒµÿ»µîçÚÆê´╝îÚéúµêæõ╗¼Õ░▒ÕÅ»õ╗Ñþö¿µò░þ╗äµØÑÕ¡ÿµö¥Õ碵ò░µîçÚÆêÒÇéõ©ïÚØóµêæõ╗¼þ£ïõ©Çõ©¬Õ碵ò░µîçÚÆêµò░þ╗äþÜäõ¥ïÕ¡É´╝Ü
/* 方法1 */
void (*func_array_1[5])(int, int, float);
/* 方法2 */
typedef void (*p_func_array)(int, int, float);
p_func_array func_array_2[5];void (\*)(int, int, float) * þÜäÕ碵ò░µîçÚÆêµò░þ╗äÒÇé6. Õ碵ò░µîçÚÆêµÇ╗þ╗ô
Õ碵ò░µîçÚÆêÕ©©ÚçÅ ´╝ÜMax´╝øÕ碵ò░µîçÚÆêÕÅÿÚçÅ´╝Üp´╝ø
µò░ÕÉìÞ░âþö¿Õªéµ×£Úâ¢Õ¥ùÕªé(*myFun)(10)Þ┐ÖµáÀ´╝îÚéúõ╣ªÕåÖõ©ÄÞ»╗ÞÁÀµØÑÚ⢵ÿ»õ©ìµû╣õ¥┐ÕÆîõ©ìõ╣áµâ»þÜäÒÇéµëÇõ╗ÑCÞ»¡Þ¿ÇþÜäÞ«¥Þ«íÞÇàõ╗¼µëìõ╝ÜÞ«¥Þ«íµêÉÕÅêÕÅ»ÕàüÞ«©myFun(10)Þ┐ÖþºìÕ¢óÕ╝ÅÕ£░Þ░âþö¿´╝êÞ┐ÖµáÀµû╣õ¥┐ÕñÜõ║å´╝îÕ╣Âõ©Äµò░Õ¡ªõ©¡þÜäÕ碵ò░Õ¢óÕ╝Åõ©ÇµáÀ´╝ëÒÇé
Õ£¿Õ碵ò░µîçÚÆêÕÅÿÚçÅõ╣ƒÕÅ»õ╗ÑÕ¡ÿÕàÑõ©Çõ©¬µò░þ╗äÕåàÒÇéµò░þ╗äþÜäÕú░µÿĵû╣µ│ò´╝Üint (*fArray[10]) ( int );
µêæõ╗¼ÕàêµØÑþ£ïþ£ïþÖ¥Õ║ªþÖ¥þºæµÿ»Õªéõ¢òÕ«Üõ╣ëÕø×Þ░âÕ碵ò░þÜä´╝Ü
Õø×Þ░âÕ碵ò░Õ░▒µÿ»õ©Çõ©¬ÚÇÜÞ┐çÕ碵ò░µîçÚÆêÞ░âþö¿þÜäÕ碵ò░ÒÇéÕªéµ×£õ¢áµèèÕ碵ò░þÜäµîçÚÆê´╝êÕ£░ÕØÇ´╝ëõ¢£õ©║ÕÅéµò░õ╝áÚÇÆþ╗ÖÕŪõ©Çõ©¬Õ碵ò░´╝îÕ¢ôÞ┐Öõ©¬µîçÚÆêÞó½þö¿µØÑÞ░âþö¿ÕàµëǵîçÕÉæþÜäÕ碵ò░µù´╝îµêæõ╗¼Õ░▒Þ»┤Þ┐Öµÿ»Õø×Þ░âÕ碵ò░ÒÇéÕø×Þ░âÕ碵ò░õ©ìµÿ»þö▒Þ»ÑÕ碵ò░þÜäÕ«×þÄ░µû╣þø┤µÄÑÞ░âþö¿´╝îÞÇîµÿ»Õ£¿þë╣Õ«ÜþÜäõ║ïõ╗µêûµØíõ╗ÂÕÅæþöƒµùÂþö▒ÕŪÕñûþÜäõ©Çµû╣Þ░âþö¿þÜä´╝îþö¿õ║ÄÕ»╣Þ»Ñõ║ïõ╗µêûµØíõ╗ÂÞ┐øÞíîÕôìÕ║öÒÇéÞ┐Öµ«Á޻ص»öÞ¥âÚò┐´╝îõ╣ƒµ»öÞ¥âþ╗òÕÅúÒÇéõ©ïÚØóµêæÚÇÜÞ┐çõ©ÇÕ╣àÕø¥µØÑÞ»┤µÿÄõ╗Çõ╣êµÿ»Õø×Þ░â´╝Ü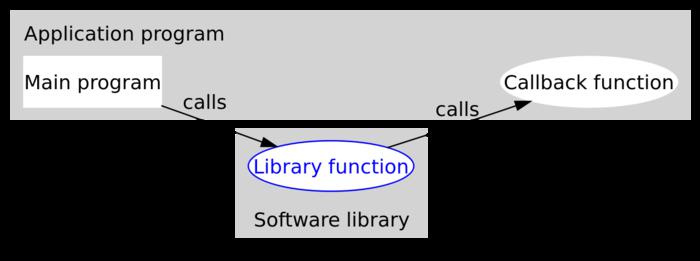
ÕüçÞ«¥µêæõ╗¼Þªüõ¢┐þö¿õ©Çõ©¬µÄÆÕ║ÅÕ碵ò░µØÑÕ»╣µò░þ╗äÞ┐øÞíîµÄÆÕ║Å´╝îÚéúõ╣êÕ£¿õ©╗þ¿ïÕ║Å(Main program)õ©¡´╝îµêæõ╗¼ÕàêÚÇÜÞ┐çÕ║ô´╝îÚÇëµï®õ©Çõ©¬Õ║ôµÄÆÕ║ÅÕ碵ò░(Library function)ÒÇéõ¢åµÄÆÕ║Åþ«ùµ│òµ£ëÕ¥êÕñÜ´╝îµ£ëÕåƵ│íµÄÆÕ║Å´╝îÚÇëµï®µÄÆÕ║Å´╝îÕ┐½ÚǃµÄÆÕ║Å´╝îÕ¢ÆÕ╣µÄÆÕ║ÅÒÇéÕÉîµù´╝îµêæõ╗¼õ╣ƒÕÅ»Þâ¢Ú£ÇÞªüÕ»╣þë╣µ«èþÜäÕ»╣Þ▒íÞ┐øÞíîµÄÆÕ║Å´╝îµ»öÕªéþë╣Õ«ÜþÜäþ╗ôµ×äõ¢ôþ¡ëÒÇéÕ║ôÕ碵ò░õ╝ܵá╣µì«µêæõ╗¼þÜäÚ£ÇÞªüÚÇëµï®õ©ÇþºìµÄÆÕ║Åþ«ùµ│ò´╝îþäÂÕÉÄÞ░âþö¿Õ«×þÄ░Þ»Ñþ«ùµ│òþÜäÕ碵ò░µØÑÕ«îµêɵÄÆÕ║ÅÕÀÑõ¢£ÒÇéÞ┐Öõ©¬Þó½Þ░âþö¿þÜäµÄÆÕ║ÅÕ碵ò░Õ░▒µÿ»Õø×Þ░âÕ碵ò░(Callback function)ÒÇé
þ╗ôÕÉêÞ┐ÖÕ╣àÕø¥ÕÆîõ©èÚØóÕ»╣Õø×Þ░âÕ碵ò░þÜäÞºúÚçè´╝îµêæõ╗¼ÕÅ»õ╗ÑÕÅæþÄ░´╝îÞªüÕ«×þÄ░Õø×Þ░âÕ碵ò░´╝îµ£ÇÕà│Úö«þÜäõ©Çþé╣Õ░▒µÿ»ÞªüÕ░åÕ碵ò░þÜäµîçÚÆêõ╝áÚÇÆþ╗Öõ©Çõ©¬Õ碵ò░(õ©èÕø¥õ©¡µÿ»Õ║ôÕ碵ò░)´╝îþäÂÕÉÄÞ┐Öõ©¬Õ碵ò░Õ░▒ÕÅ»õ╗ÑÚÇÜÞ┐çÞ┐Öõ©¬µîçÚÆêµØÑÞ░âþö¿Õø×Þ░âÕ碵ò░õ║åÒÇéµ│¿µäÅ´╝îÕø×Þ░âÕ碵ò░Õ╣Âõ©ìµÿ»CÞ»¡Þ¿Çþë╣µ£ëþÜä´╝îÕçáõ╣Äõ╗╗õ¢òÞ»¡Þ¿ÇÚ⢵£ëÕø×Þ░âÕ碵ò░ÒÇéÕ£¿CÞ»¡Þ¿Çõ©¡´╝îµêæõ╗¼ÚÇÜÞ┐çõ¢┐þö¿Õ碵ò░µîçÚÆêµØÑÕ«×þÄ░Õø×Þ░âÕ碵ò░ÒÇé
µêæþÜäþÉåÞºúµÿ»´╝ܵèèõ©Çµ«ÁÕÅ»µëºÞíîþÜäõ╗úþáüÕâÅÕÅéµò░õ╝áÚÇÆÚéúµáÀõ╝áþ╗ÖÕàÂõ╗ûõ╗úþáü´╝îÞÇîÞ┐Öµ«Áõ╗úþáüõ╝ÜÕ£¿µƒÉõ©¬µùÂÕê╗Þó½Þ░âþö¿µëºÞíî´╝îÞ┐ÖÕ░▒ÕŽÕüÜÕø×Þ░âÒÇé
Õªéµ×£õ╗úþáüþ½ïÕì│Þó½µëºÞíîÕ░▒þº░õ©║ÕÉÑÕø×Þ░â´╝îÕªéµ×£Þ┐çÕÉÄÕåìµëºÞíî´╝îÕêÖþº░õ╣ïõ©║Õ╝鵡ÑÕø×Þ░âÒÇé
Õø×Þ░âÕ碵ò░Õ░▒µÿ»õ©Çõ©¬ÚÇÜÞ┐çÕ碵ò░µîçÚÆêÞ░âþö¿þÜäÕ碵ò░ÒÇéÕªéµ×£õ¢áµèèÕ碵ò░þÜäµîçÚÆê´╝êÕ£░ÕØÇ´╝ëõ¢£õ©║ÕÅéµò░õ╝áÚÇÆþ╗ÖÕŪõ©Çõ©¬Õ碵ò░´╝îÕ¢ôÞ┐Öõ©¬µîçÚÆêÞó½þö¿µØÑÞ░âþö¿ÕàµëǵîçÕÉæþÜäÕ碵ò░µù´╝îµêæõ╗¼Õ░▒Þ»┤Þ┐Öµÿ»Õø×Þ░âÕ碵ò░ÒÇé
2. õ©║õ╗Çõ╣êÞªüþö¿Õø×Þ░âÕ碵ò░´╝ƒ
Õøáõ©║ÕÅ»õ╗ѵèèÞ░âþö¿ÞÇàõ©ÄÞó½Þ░âþö¿ÞÇàÕêåÕ╝Ç´╝îµëÇõ╗ÑÞ░âþö¿ÞÇàõ©ìÕà│Õ┐âÞ░üµÿ»Þó½Þ░âþö¿ÞÇàÒÇéÕ«âÕŬڣÇþƒÑÚüôÕ¡ÿÕ£¿õ©Çõ©¬ÕàÀµ£ëþë╣Õ«ÜÕăÕ×ïÕÆîÚÖÉÕêµØíõ╗ÂþÜäÞó½Þ░âþö¿Õ碵ò░ÒÇéþ«ÇÞÇîÞ¿Çõ╣ï´╝îÕø×Þ░âÕ碵ò░Õ░▒µÿ»ÕàüÞ«©þö¿µêÀµèèÚ£ÇÞªüÞ░âþö¿þÜäµû╣µ│òþÜäµîçÚÆêõ¢£õ©║ÕÅéµò░õ╝áÚÇÆþ╗Öõ©Çõ©¬Õ碵ò░´╝îõ╗Ñõ¥┐Þ»ÑÕ碵ò░Õ£¿ÕñäþÉåþø©õ╝╝õ║ïõ╗ÂþÜäµùÂÕÇÖÕÅ»õ╗ÑþüÁµ┤╗þÜäõ¢┐þö¿õ©ìÕÉîþÜäµû╣µ│òÒÇé
int Callback() // /< Õø×Þ░âÕ碵ò░
{
// TODO
return 0;
}
int main() // /< õ©╗Õ碵ò░
{
// TODO
Library(Callback); // /< Õ║ôÕ碵ò░ÚÇÜÞ┐çÕ碵ò░µîçÚÆêÞ┐øÞíîÕø×Þ░â
// TODO
return 0;
}Õø×Þ░âõ╝╝õ╣ÄÕŬµÿ»Õ碵ò░Úù┤þÜäÞ░âþö¿´╝îÕÆîµÖ«ÚÇÜÕ碵ò░Þ░âþö¿µ▓íÕòÑÕî║Õê½ÒÇé
õ¢åõ╗öþ╗åþ£ï´╝îÕÅ»õ╗ÑÕÅæþÄ░õ©ñÞÇàõ╣ïÚù┤þÜäõ©Çõ©¬Õà│Úö«þÜäõ©ìÕÉî´╝ÜÕ£¿Õø×Þ░âõ©¡´╝îõ©╗þ¿ïÕ║ŵèèÕø×Þ░âÕ碵ò░ÕâÅÕÅéµò░õ©ÇµáÀõ╝áÕàÑÕ║ôÕ碵ò░ÒÇé
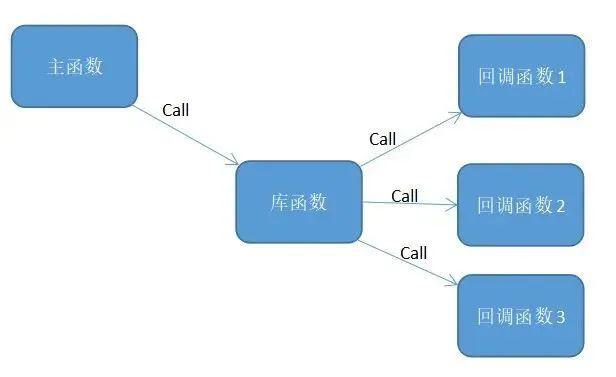
3. µÇÄõ╣êõ¢┐þö¿Õø×Þ░âÕ碵ò░´╝ƒ
int Callback_1(int a) // /< Õø×Þ░âÕ碵ò░1
{
printf("Hello, this is Callback_1: a = %d ", a);
return 0;
}
int Callback_2(int b) // /< Õø×Þ░âÕ碵ò░2
{
printf("Hello, this is Callback_2: b = %d ", b);
return 0;
}
int Callback_3(int c) // /< Õø×Þ░âÕ碵ò░3
{
printf("Hello, this is Callback_3: c = %d ", c);
return 0;
}
int Handle(int x, int (*Callback)(int)) // /< µ│¿µäÅÞ┐ÖÚçîþö¿Õê░þÜäÕ碵ò░µîçÚÆêÕ«Üõ╣ë
{
Callback(x);
}
int main()
{
Handle(4, Callback_1);
Handle(5, Callback_2);
Handle(6, Callback_3);
return 0;
}4. õ©ïÚØóµÿ»õ©Çõ©¬ÕøøÕêÖÞ┐Éþ«ùþÜäþ«ÇÕìòÕø×Þ░âÕ碵ò░õ¥ïÕ¡É´╝Ü
#include <stdio.h>
#include <stdlib.h>
/****************************************
* Õ碵ò░µîçÚÆêþ╗ôµ×äõ¢ô
***************************************/
typedef struct _OP {
float (*p_add)(float, float);
float (*p_sub)(float, float);
float (*p_mul)(float, float);
float (*p_div)(float, float);
} OP;
/****************************************
* ÕèáÕçÅõ╣ÿÚÖñÕ碵ò░
***************************************/
float ADD(float a, float b)
{
return a + b;
}
float SUB(float a, float b)
{
return a - b;
}
float MUL(float a, float b)
{
return a * b;
}
float DIV(float a, float b)
{
return a / b;
}
/****************************************
* ÕêØÕºïÕîûÕ碵ò░µîçÚÆê
***************************************/
void init_op(OP *op)
{
op->p_add = ADD;
op->p_sub = SUB;
op->p_mul = &MUL;
op->p_div = &DIV;
}
/****************************************
* Õ║ôÕ碵ò░
***************************************/
float add_sub_mul_div(float a, float b, float (*op_func)(float, float))
{
return (*op_func)(a, b);
}
int main(int argc, char *argv[])
{
OP *op = (OP *)malloc(sizeof(OP));
init_op(op);
/* þø┤µÄÑõ¢┐þö¿Õ碵ò░µîçÚÆêÞ░âþö¿Õ碵ò░ */
printf("ADD = %f, SUB = %f, MUL = %f, DIV = %f\n", (op->p_add)(1.3, 2.2), (*op->p_sub)(1.3, 2.2),
(op->p_mul)(1.3, 2.2), (*op->p_div)(1.3, 2.2));
/* Þ░âþö¿Õø×Þ░âÕ碵ò░ */
printf("ADD = %f, SUB = %f, MUL = %f, DIV = %f\n",
add_sub_mul_div(1.3, 2.2, ADD),
add_sub_mul_div(1.3, 2.2, SUB),
add_sub_mul_div(1.3, 2.2, MUL),
add_sub_mul_div(1.3, 2.2, DIV));
return 0;
}õ©Çõ©¬ GPRS µ¿íÕØùÞüöþ¢æþÜäÕ░ÅÚí╣þø«´╝îõ¢┐þö¿Þ┐çþÜäÕÉîÕ¡ªÕñºµªéþƒÑÚüô 2GÒÇü4GÒÇüNB þ¡ëµ¿íÕØùÞªüµâ│Õ«×þÄ░µùáþ║┐Þüöþ¢æÕèƒÞâ¢Úâ¢Ú£ÇÞªüþ╗ÅÕÄ嵿íÕØùõ©èþöÁÕêØÕºïÕîûÒÇüµ│¿Õåîþ¢æþ╗£ÒÇüµƒÑÞ»óþ¢æþ╗£õ┐íµü»Þ┤¿ÚçÅÒÇüÞ┐×µÄѵ£ìÕèíÕÖ¿þ¡ëµ¡ÑÚ¬ñ´╝îÞ┐ÖÚçîþÜäþÜäõ¥ïÕ¡ÉÕ░▒µÿ»´╝îÕê®þö¿õ©Çõ©¬þèµÇüµ£║Õ碵ò░´╝êµá╣µì«õ©ìÕÉîþèµÇüõ¥Øµ¼íÞ░âþö¿õ©ìÕÉîÕ«×þÄ░µû╣µ│òþÜäÕ碵ò░´╝ë´╝îÚÇÜÞ┐çÕø×Þ░âÕ碵ò░þÜäµû╣Õ╝Åõ¥Øµ¼íÞ░âþö¿õ©ìÕÉîþÜäÕ碵ò░´╝îÕ«×þÄ░µ¿íÕØùÞüöþ¢æÕèƒÞ⢴╝îÕªéõ©ï´╝Ü
/********* ÕÀÑõ¢£þèµÇüÕñäþÉå *********/
typedef struct
{
uint8_t mStatus;
uint8_t (* Funtion)(void); //Õ碵ò░µîçÚÆêþÜäÕ¢óÕ╝Å
} M26_WorkStatus_TypeDef; //M26þÜäÕÀÑõ¢£þèµÇüÚøåÕÉêÞ░âþö¿Õ碵ò░
/**********************************************
** >M26ÕÀÑõ¢£þèµÇüÚøåÕÉêÕ碵ò░
***********************************************/
M26_WorkStatus_TypeDef M26_WorkStatus_Tab[] =
{
{GPRS_NETWORK_CLOSE, M26_PWRKEY_Off }, //µ¿íÕØùÕà│µ£║
{GPRS_NETWORK_OPEN, M26_PWRKEY_On }, //µ¿íÕØùÕ╝ǵ£║
{GPRS_NETWORK_Start, M26_Work_Init }, //þ«íÞäÜÕêØÕºïÕîû
{GPRS_NETWORK_CONF, M26_NET_Config }, //ATµîçõ╗ñÚàìþ¢«
{GPRS_NETWORK_LINK_CTC, M26_LINK_CTC }, //Þ┐×µÄÑÞ░âÕ║ªõ©¡Õ┐â
{GPRS_NETWORK_WAIT_CTC, M26_WAIT_CTC }, //þ¡ëÕ¥àÞ░âÕ║ªõ©¡Õ┐âÕø×Õñì
{GPRS_NETWORK_LINK_FEM, M26_LINK_FEM }, //Þ┐×µÄÑÕëìþ¢«µ£║
{GPRS_NETWORK_WAIT_FEM, M26_WAIT_FEM }, //þ¡ëÕ¥àÕëìþ¢«µ£║Õø×Õñì
{GPRS_NETWORK_COMM, M26_COMM }, //µ¡úÕ©©ÕÀÑõ¢£
{GPRS_NETWORK_WAIT_Sig, M26_WAIT_Sig }, //þ¡ëÕ¥àõ┐íÕÅÀÕø×Õñì
{GPRS_NETWORK_GetSignal, M26_GetSignal }, //ÞÄÀÕÅûõ┐íÕÅÀÕÇ╝
{GPRS_NETWORK_RESTART, M26_RESET }, //µ¿íÕØùÚçìÕÉ»
}
/**********************************************
** >M26µ¿íÕØùÕÀÑõ¢£þèµÇüµ£║´╝îõ¥Øµ¼íÞ░âþö¿ÚçîÚØóþÜä12õ©¬Õ碵ò░
***********************************************/
uint8_t M26_WorkStatus_Call(uint8_t Start)
{
uint8_t i = 0;
for(i = 0; i < 12; i++)
{
if(Start == M26_WorkStatus_Tab[i].mStatus)
{
return M26_WorkStatus_Tab[i].Funtion();
}
}
return 0;
}µëÇõ╗Ñ´╝îÕªéµ×£µ£ëõ║║µâ│ÕüÜõ©¬ NB µ¿íÕØùÞüöþ¢æÚí╣þø«´╝îÕÅ»õ╗Ñ copy õ©èÚØóþÜäµíåµ×´╝îÕŬڣÇÞªüõ┐«µö╣Õø×Þ░âÕ碵ò░ÕåàÚâ¿þÜäÕàÀõ¢ôÕ«×þÄ░´╝îµêûÞÇàÕó×ÕèáÒÇüÕçÅÕ░æÕø×Þ░âÕ碵ò░´╝îÕ░▒ÕÅ»õ╗ÑÕ¥êþ«Çµ┤üÕ┐½ÚǃþÜäÕ«×þÄ░µ¿íÕØùÞüöþ¢æÒÇé
- EOF -
Õèáõ©╗ÚíÁÕÉøÕ¥«õ┐í´╝îõ©ìõ╗àC/C++µèÇÞâ¢+1

õ©╗ÚíÁÕÉøµùÑÕ©©Þ┐ÿõ╝ÜÕ£¿õ©¬õ║║Õ¥«õ┐íÕêåõ║½C/C++Õ╝ÇÕÅæÕ¡ªõ╣áÞÁäµ║ÉÕÆîµèǵ£»µûçþ½áþ▓¥ÚÇë´╝îõ©ìիܵ£ƒÕêåõ║½õ©Çõ║øµ£ëµäŵÇØþÜäµ┤╗Õè¿ÒÇüÕ▓ùõ¢ìÕåàµÄ¿õ╗ÑÕÅèÕªéõ¢òþö¿µèǵ£»ÕüÜõ©Üõ¢ÖÚí╣þø«

Õèáõ©¬Õ¥«õ┐í´╝îµëôÕ╝Çõ©Çµëçþ¬ù
1ÒÇü
2ÒÇü
3ÒÇü
Õà│µ│¿ÒÇÄCPPÕ╝ÇÕÅæÞÇàÒÇÅ
þ£ïþ▓¥ÚÇëC/C++µèǵ£»µûçþ½á
þé╣ÞÁ×ÕÆîÕ£¿þ£ïÕ░▒µÿ»µ£ÇÕñºþÜäµö»µîüÔØñ´©Å