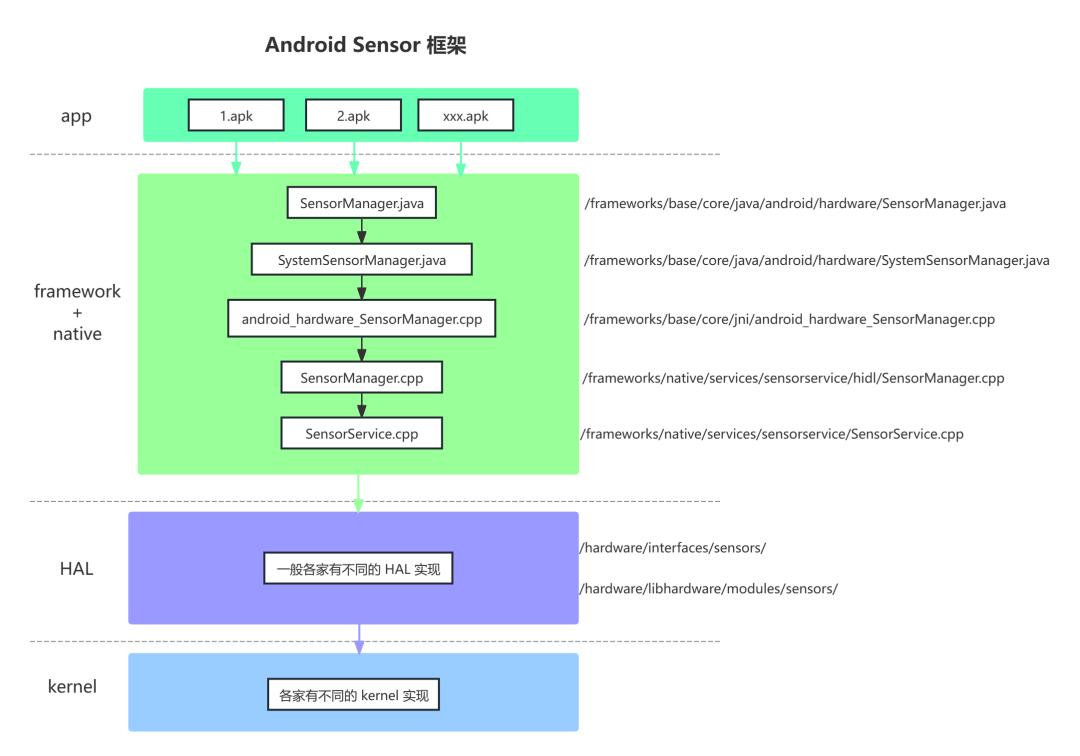
Android Sensor жЎҶжһ¶
дёҖеӣҫиғңеҚғиЁҖ
RK sensor
дёҚеҗҢе№іеҸ°еңЁ kernel еұӮзҡ„е®һзҺ°дёҚдёҖж ·пјҢRKгҖҒMTKгҖҒй«ҳйҖҡ дёү家йғҪжңүиҮӘе·ұзҡ„жЎҶжһ¶гҖӮдёӢж–ҮеҸӘд»Ӣз»Қ RK sensor еңЁ kernel еұӮзҡ„жЎҶжһ¶гҖӮ
ж №жҚ®дә§е“ҒеҪўжҖҒзҡ„дёҚеҗҢпјҢMTK е’Ңй«ҳйҖҡзҡ„ sensor жЎҶжһ¶жҜ”иҫғеғҸпјҢеӣ дёәеҒҡзҡ„жҳҜжүӢжңәпјҢйңҖиҰҒдҪҺеҠҹиҖ—пјҢжүҖд»Ҙ sensor дёҚдјҡжҢӮеңЁ kernelпјҢиҖҢжҳҜж”ҫеңЁдёҖдёӘеҚ•зүҮжңәдёӯи·‘пјҢйңҖиҰҒж•°жҚ®зҡ„ж—¶еҖҷйҖҡиҝҮж ёй—ҙйҖҡдҝЎжҠҘз»ҷ kernelпјҢkernel еҶҚеҫҖдёҠжҠҘгҖӮиҖҢ RK е№іеҸ°жҳҜжҠҠжүҖжңүзҡ„дј ж„ҹеҷЁзӣҙжҺҘжҢӮеңЁ kernelпјҢдёҚиҖғиҷ‘дҪҺеҠҹиҖ—еңәжҷҜгҖӮ
RK е№іеҸ° Sensor д»Јз Ғи·Ҝеҫ„пјҡ/kernel/drivers/input/sensors/

sensor-dev.c жҳҜж ёеҝғд»Јз ҒпјҢж•ҙеҗҲдәҶдёҚеҗҢзұ»еһӢзҡ„ sensorпјҢеҢ…жӢ¬ accel, gyro, lsensor, psensor, compass зӯүгҖӮе°ҒиЈ…е…·дҪ“ sensor й©ұеҠЁзҡ„з”іиҜ·гҖҒжіЁеҶҢеҮҪж•°гҖӮ
sensor-i2c.c е°ҒиЈ… i2c жҺҘеҸЈеҮҪж•°гҖӮ
sensor-i2c.c е’Ң sensor-dev.c з»„жҲҗ RK sensor coreгҖӮз”ұе®ғжқҘж”Ҝж’‘е…·дҪ“ sensor зҡ„жҙ»еҠЁе№¶еӣһи°ғе…·дҪ“ sensor й©ұеҠЁжҸҗдҫӣзҡ„й’©еӯҗеҮҪж•°гҖӮ
RK3399
еҚҡдё»жүӢйҮҢжңүдёҖеқ— RK3399 зҡ„жқҝеӯҗпјҢеёҰзҡ„ sensor еҺҹзҗҶеӣҫеҰӮдёӢпјҡ
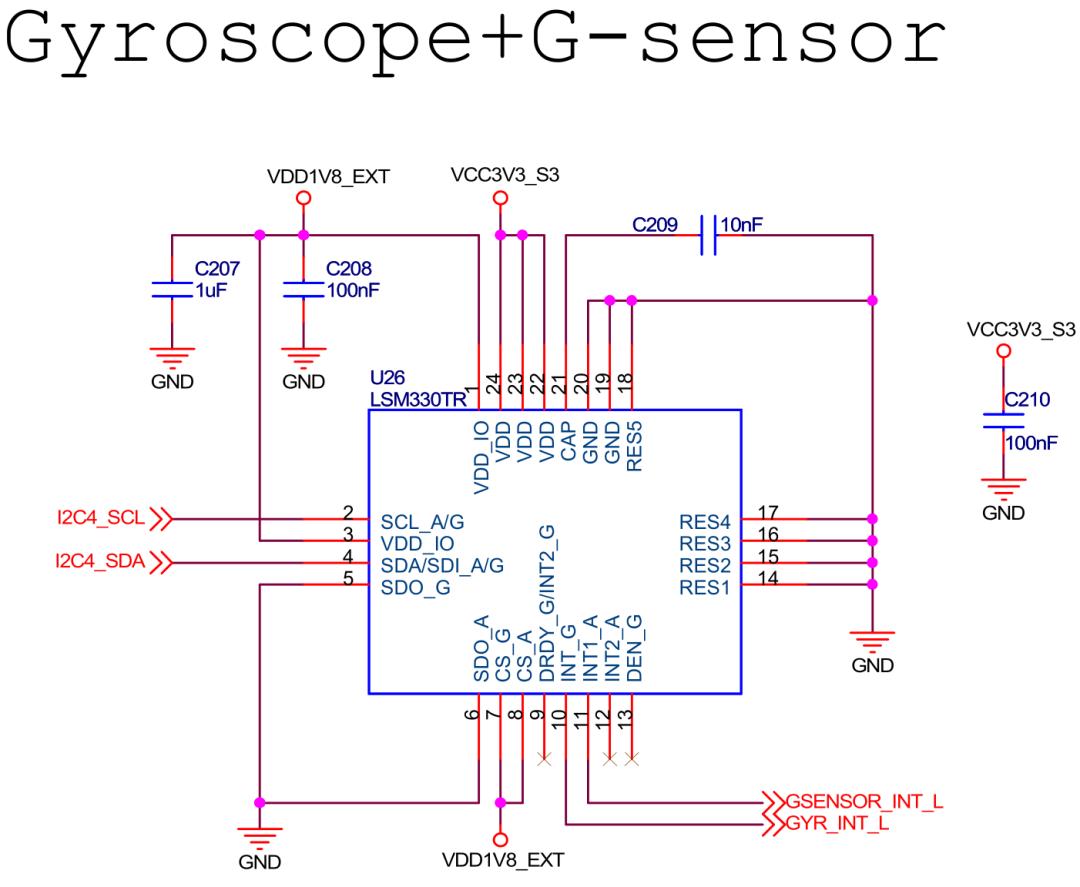
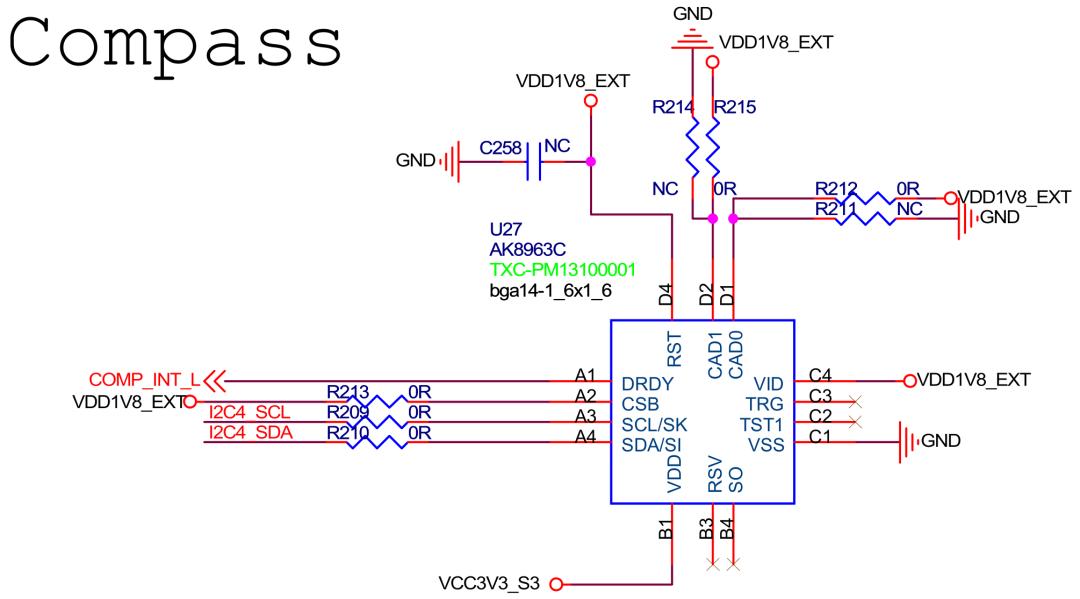
д»Һ dts зңӢпјҢ他们жҢӮеңЁдёҖи·Ҝ I2C4пјҢйҖҹзҺҮжҳҜ 400KhzгҖӮеҜ№дәҺиҰҒжұӮжӣҙй«ҳзҡ„дә§е“ҒжқҘи®ІпјҢе»әи®® accgyro еҚ•зӢ¬дҪҝз”ЁдёҖи·Ҝ SPIпјҢе…¶д»–зҡ„ sensor еҸҜд»Ҙе…ұз”ЁдёҖи·Ҝ I2CгҖӮ
i2c@ff3d0000 {
compatible = "rockchip,rk3399-i2c";
reg = <0x0 0xff3d0000 0x0 0x1000>;
clocks = <0x2f 0xa 0x2f 0x1c>;
clock-names = "i2c", "pclk";
interrupts = <0x0 0x38 0x4 0x0>;
pinctrl-names = "default";
pinctrl-0 = <0x80>;
#address-cells = <0x1>;
#size-cells = <0x0>;
status = "okay";
i2c-scl-rising-time-ns = <345>;
i2c-scl-falling-time-ns = <11>;
clock-frequency = <400000>;
phandle = <0x117>;
lsm330_accel@1e {
status = "okay";
compatible = "lsm330_acc";
pinctrl-names = "default";
pinctrl-0 = <0x81>;
reg = <0x1e>;
irq-gpio = <0x33 0x16 0x1>;
type = <0x2>;
irq_enable = <0x1>;
poll_delay_ms = <0x1e>;
power-off-in-suspend = <0x1>;
layout = <0x4>;
};
lsm330_gyro@6a {
status = "okay";
compatible = "lsm330_gyro";
pinctrl-names = "default";
pinctrl-0 = <0x82>;
reg = <0x6a>;
irq-gpio = <0x33 0x18 0x1>;
type = <0x4>;
irq_enable = <0x0>;
power-off-in-suspend = <0x1>;
poll_delay_ms = <0x1e>;
};
sensor@0f {
status = "okay";
compatible = "ak8963";
pinctrl-names = "default";
pinctrl-0 = <0x83>;
reg = <0xf>;
type = <0x3>;
irq-gpio = <0x33 0x0 0x1>;
irq_enable = <0x0>;
poll_delay_ms = <0x1e>;
layout = <0x3>;
};
sensor@10 {
status = "okay";
compatible = "capella,light_cm3218";
pinctrl-names = "default";
pinctrl-0 = <0x84>;
reg = <0x10>;
type = <0x5>;
irq-gpio = <0x85 0x18 0x2>;
irq_enable = <0x1>;
poll_delay_ms = <0x1e>;
};
};
Sensor driver е®һзҺ°еңЁ /drivers/input/sensors/пјҢе®һзҺ°зҡ„д№ҹеҫҲз®ҖеҚ•пјҢе°ұжҳҜеҜ№ sensor IC еҜ„еӯҳеҷЁеҲқе§ӢеҢ–еҗҺпјҢиҜ»еҸ–ж•°жҚ®пјҢйҖҡиҝҮ input еӯҗзі»з»ҹдёҠжҠҘгҖӮ
дёҖиҲ¬зҡ„еөҢе…ҘејҸи®ҫеӨҮпјҢйғҪжңүеҠ йҖҹеәҰ accпјҢйҷҖиһәд»Ә gyroпјҢе…үзәҝдј ж„ҹеҷЁ alsпјҢзЈҒеҠӣдј ж„ҹеҷЁ magгҖӮ
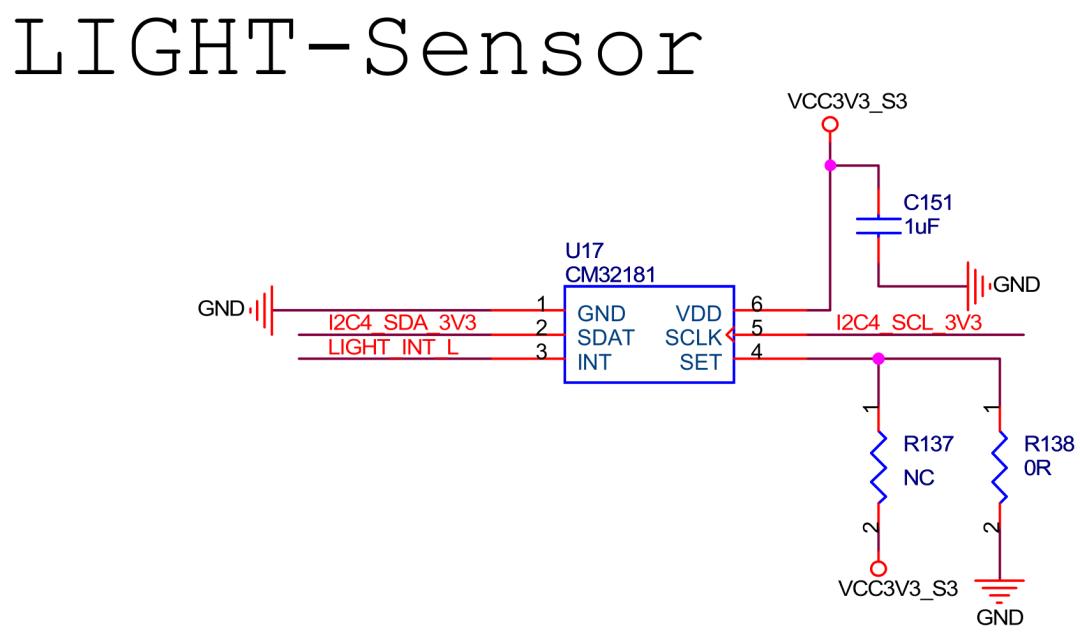
иҝҷйҮҢ lsm330 жҳҜ acc+gyro дәҢеҗҲдёҖпјҢcm32181 жҳҜ alsпјҢak8963 жҳҜ magпјҢд№ҹеҸ«з”өеӯҗзҪ—зӣҳ compassгҖӮиҝҷйҮҢзјәе°‘дәҶи·қзҰ»дј ж„ҹеҷЁ psпјҢеҫҲеӨҡеҷЁд»¶жҳҜ als+ps дәҢеҗҲдёҖзҡ„пјҢж №жҚ®дә§е“ҒеҪўжҖҒеҶіе®ҡиҰҒдёҚиҰҒеҠ psгҖӮ
RK д№ҹжІЎжңүжҸҗдҫӣиҷҡжӢҹ sensorпјҢйңҖиҰҒзҡ„иҜқйңҖиҰҒиҮӘе·ұе®һзҺ°гҖӮиҷҡжӢҹ sensor е°ұжҳҜеҲ©з”ЁеӨҡдёӘзү©зҗҶ sensor зҡ„ж•°жҚ®иҝӣиЎҢиҖҰеҗҲпјҢе®һзҺ°е…¶д»–еҠҹиғҪзҡ„ sensorгҖӮеёёи§Ғзҡ„иҷҡжӢҹ sensor жңүи®ЎжӯҘеҷЁгҖҒжҠ¬жүӢдә®еұҸзӯүгҖӮ