еӨ§е®¶еҘҪпјҢжҲ‘жҳҜеөҢе…ҘејҸиҖҒжһ—пјҢд»ҺдәӢеөҢе…ҘејҸиҪҜ件ејҖеҸ‘еӨҡе№ҙпјҢд»ҠеӨ©еҲҶдә«зҡ„еҶ…е®№жҳҜжҜ«зұіжіўйӣ·иҫҫеҹәзЎҖchirpгҖҒprofileе’Ңframeзҡ„д»Ӣз»ҚпјҢеёҢжңӣиғҪеҜ№дҪ жңүжүҖеё®еҠ©
дёҖгҖҒжҜ«зұіжіўйӣ·иҫҫз®Җд»Ӣ
жҜ«зұіжіўйӣ·иҫҫпјҲmillimeter-wave radarпјүпјҢе·ҘдҪңеңЁйў‘зҺҮдёә30пҪһ300GHzпјҢжіўй•ҝдёә 1пҪһ10mmзҡ„йӣ·иҫҫгҖӮ
1.1 жҜ«зұіжіўйӣ·иҫҫдјҳзӮ№
жҲҗжң¬йҖӮдёӯпјҢйҖӮеәҰиҜҶеҲ«иғҪеҠӣејә
дёҚиүҜеӨ©ж°”жҠ—е№Іжү°иғҪеҠӣејәгҖӮиҝҷжҳҜз”ұдәҺжҜ«зұіжіўйӣ·иҫҫжіўжқҹзӘ„гҖҒи§’еҲҶиҫЁеҠӣй«ҳгҖҒйў‘еёҰе®ҪгҖҒйҡҗи”ҪжҖ§еҘҪгҖӮ
еҜ№зғҹгҖҒе°ҳгҖҒйӣЁгҖҒйӣҫзӯүе…·жңүиүҜеҘҪзҡ„з©ҝйҖҸжҖ§гҖӮ
1.2 жҜ«зұіжіўйӣ·иҫҫзјәзӮ№
еҸҜжҺўжөӢзҡ„и§’еәҰе°Ҹ
еҸҜжҺўжөӢзҡ„и·қзҰ»дёҚеҰӮжҝҖе…үйӣ·иҫҫ
е…ідәҺйӣ·иҫҫзҡ„еҹәзЎҖзҹҘиҜҶд»Ӣз»ҚпјҢд»Җд№ҲжҳҜйӣ·иҫҫпјҢеёёи§Ғйӣ·иҫҫзҡ„еҲҶзұ»пјҢдёҚеҗҢйӣ·иҫҫд№Ӣй—ҙзҡ„зү№зӮ№пјҢеҸҜеҸӮиҖғд№ӢеүҚзҡ„ж–Үз«
дәҢгҖҒд»Җд№ҲжҳҜchirp
chirpжҳҜFMCW (Frequency Modulated Continuous Wave и°ғйў‘иҝһз»ӯжіў)йӣ·иҫҫеҸ‘е°„зҡ„дҝЎеҸ·пјҢйў‘зҺҮйҡҸзқҖж—¶й—ҙзәҝжҖ§еўһеҠ гҖӮйҖҡеёёжҠҠиҝҷз§ҚдҝЎеҸ·з§°дҪңе•Ғе•ҫ(chirp)дҝЎеҸ·
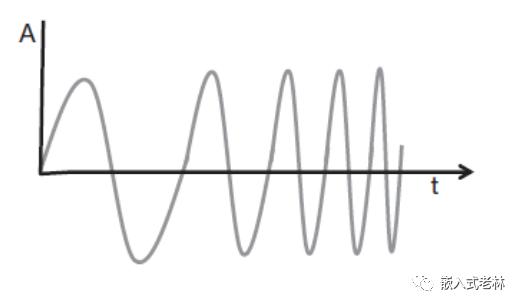
ChripдҝЎеҸ·зҡ„ж—¶еҹҹеӣҫ
вҖў зәҝжҖ§и°ғйў‘и„үеҶІзҡ„зү№еҫҒеңЁдәҺиө·е§Ӣйў‘зҺҮ (fc)гҖҒеёҰе®Ҫ (B) е’ҢжҢҒз»ӯж—¶й—ҙпјҲTCпјүгҖӮ
вҖў зәҝжҖ§и°ғйў‘и„үеҶІзҡ„ж–ңзҺҮ(S) е®ҡд№үзәҝжҖ§и°ғйў‘и„үеҶІдёҠеҚҮзҡ„йҖҹзҺҮгҖӮеңЁжӯӨзӨәдҫӢдёӯпјҢзәҝжҖ§и°ғйў‘и„үеҶІеңЁ 40us еҶ…жү«жҸҸ 4GHz зҡ„еёҰе®ҪпјҢеҜ№еә”дәҺ 100MHz/us зҡ„ж–ңзҺҮ
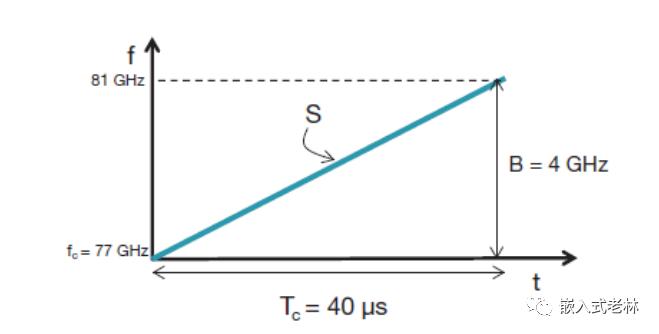
ChripдҝЎеҸ·зҡ„йў‘еҹҹеӣҫ
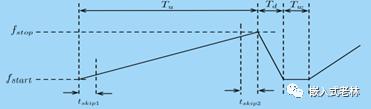
зңӢдёҖдёӢchirpдҝЎеҸ·е®һйҷ…зҡ„жіўеҪў
иө·е§Ӣйў‘зҺҮпјҢеҰӮдёӢеӣҫжүҖзӨәпјҢfstartпјҢеҚ•дҪҚпјҡGHz
еҒңжӯўйў‘зҺҮпјҢеҰӮдёӢеӣҫжүҖзӨәпјҢfstopпјҢеҚ•дҪҚпјҡGHz
chirpдёҠеҚҮж—¶й—ҙпјҢеҰӮдёӢеӣҫжүҖзӨәзҡ„TuпјҢеҚ•дҪҚжҳҜusпјӣдёҠеҚҮж—¶й—ҙеҸ—PLLж–ңзҺҮйҷҗеҲ¶пјҢ4GжЁЎејҸпјҡжңҖеӨ§дёҠеҚҮж–ңзҺҮ -250MHz/us; 1GжЁЎејҸпјҡжңҖеӨ§ж–ңзҺҮ -50MHz/us
chirpдёӢйҷҚж—¶й—ҙпјҢеҰӮдёӢеӣҫжүҖзӨәзҡ„TdпјҢеҚ•дҪҚжҳҜusпјӣдёӢйҷҚж—¶й—ҙеҸ—PLLж–ңзҺҮйҷҗеҲ¶пјҢ4GжЁЎејҸпјҡжңҖеӨ§ж–ңзҺҮ -400MHz/us; 1GжЁЎејҸпјҡжңҖеӨ§ж–ңзҺҮ -70MHz/us
chirpе‘ЁжңҹпјҢеҚ•дҪҚusпјҢTu + Td + Tw
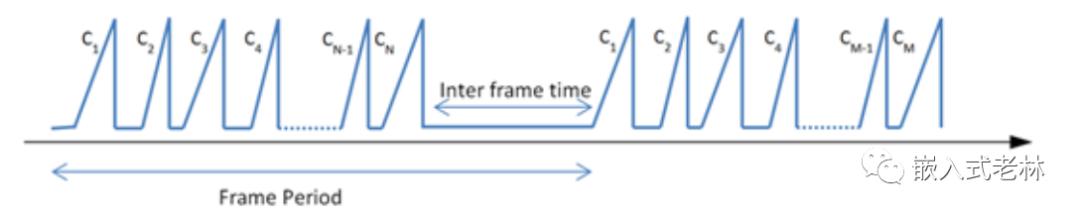
дёүгҖҒд»Җд№ҲжҳҜframe
дёҖдёӘframeз”ұеӨҡдёӘchirpз»„жҲҗпјҢеҰӮдёӢеӣҫжүҖзӨә
дёүгҖҒд»Җд№ҲжҳҜprofile
ProfileжҳҜchirpзҡ„жЁЎжқҝпјҢз”ЁжқҘе®ҡд№үдёҖдёӘжҲ–еӨҡдёӘеҸӮж•°пјҢжңҖеӨҡеҸҜд»Ҙе®ҡд№ү4дёӘprofileгҖӮйңҖиҰҒжіЁж„Ҹзҡ„жҳҜпјҢдёҚиҰҒжҠҠprofileе’ҢеӨ©зәҝдёӘж•°ж··ж·ҶпјҢprofileзҡ„дёӘж•°е’ҢеӨ©зәҝдёӘж•°ж— е…іпјҢдёҖдёӘprofileеҸҜд»Ҙй…ҚзҪ®дёҖдёӘеӨ©зәҝпјҢд№ҹеҸҜй…ҚзҪ®еӨҡдёӘеӨ©зәҝгҖӮ
жңҖеҗҺпјҢеҰӮжһңи§үеҫ—жңүеё®еҠ©пјҢеёҢжңӣдҪ иғҪдёҖй”®дёүиҝһ(еҲҶдә«пјҢзӮ№иөһпјҢеңЁзңӢ)пјҢдҪ 们зҡ„и®ӨеҸҜжҳҜжҲ‘жҢҒз»ӯиҫ“еҮәзҡ„еҠЁеҠӣпјҢж„ҹжҝҖдёҚе°Ҫ

