FreeRTOSه¦ن¹ 第5篇--ن»»هٹ،ن¼که…ˆç؛§
وœ¬و–‡ç›®و ‡ï¼ڑه¦ن¹ ن¸ژن½؟用FreeRTOSن¸çڑ„ن»»هٹ،ن¼که…ˆç؛§م€‚
وŒ‰ç…§وœ¬و–‡çڑ„وڈڈè؟°ï¼Œه؛”该هڈ¯ن»¥è·‘é€ڑه®éھŒه¹¶ن¸¾ن¸€هڈچن¸‰م€‚
وœ¬و–‡ه®éھŒو،ن»¶ï¼ڑو‹¥وœ‰Cè¯è¨€هں؛ç،€ï¼Œè£…وœ‰ç¼–译ه’Œé›†وˆگçڑ„ه¼€هڈ‘çژ¯ه¢ƒï¼Œو¯”ه¦‚ï¼ڑKeil uVision5
ن»»هٹ،ن¼که…ˆç؛§
و¯ڈن¸ھن»»هٹ،都وœ‰ن¸€ن¸ھن¼که…ˆç؛§ï¼Œç”¨و¥ه†³ه®ڑه“ھن؛›ن»»هٹ،هڈ¯ن»¥è¢«و‰§è،Œم€‚هœ¨FreeRTOSن¸ن»»هٹ،ن¼که…ˆç؛§و•°ه€¼è¶ٹه°ڈ,ن»»هٹ،ن¼که…ˆç؛§è¶ٹن½ژم€‚ن¸چè؟‡وœ‰و—¶ن¹ںè®°ن¸چن½ڈ,直وژ¥çœ‹ه°پ装ه±‚çڑ„ن؟،وپ¯و¯”较ه¥½ï¼Œهœ¨و–‡ن»¶cmsis_os2.hن¸ه®ڑن¹‰ن؛†ç›¸ه…³çڑ„ن¼که…ˆç؛§ï¼Œçœ‹è‹±و–‡و„ڈو€ه°±وک¯è¶ٹه¾€هگژن¼که…ˆç؛§ه°±è¶ٹé«کçڑ„م€‚
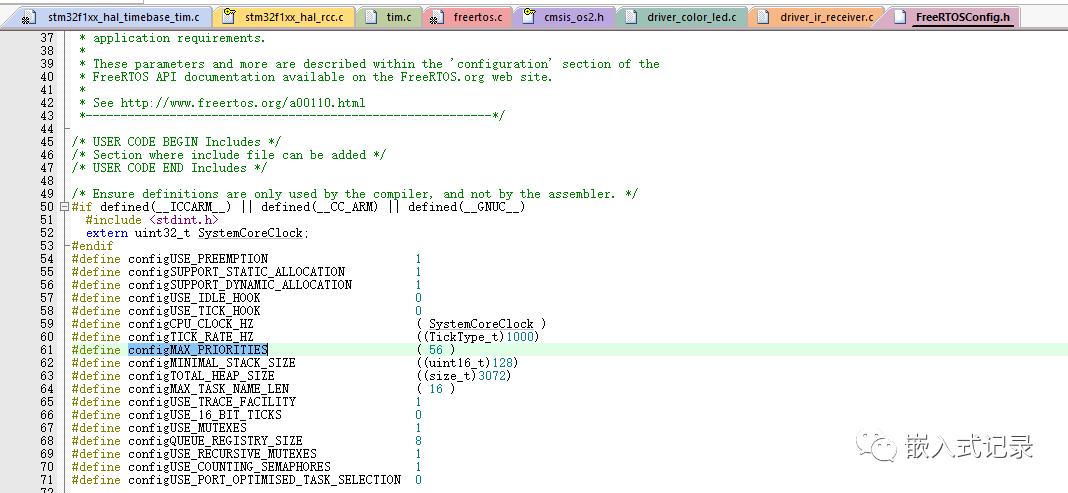
/// Priority values.typedef enum { osPriorityNone = 0, ///< No priority (not initialized). osPriorityIdle = 1, ///< Reserved for Idle thread. osPriorityLow = 8, ///< Priority: low osPriorityLow1 = 8+1, ///< Priority: low + 1 osPriorityLow2 = 8+2, ///< Priority: low + 2 osPriorityLow3 = 8+3, ///< Priority: low + 3 osPriorityLow4 = 8+4, ///< Priority: low + 4 osPriorityLow5 = 8+5, ///< Priority: low + 5 osPriorityLow6 = 8+6, ///< Priority: low + 6 osPriorityLow7 = 8+7, ///< Priority: low + 7 osPriorityBelowNormal = 16, ///< Priority: below normal osPriorityBelowNormal1 = 16+1, ///< Priority: below normal + 1 osPriorityBelowNormal2 = 16+2, ///< Priority: below normal + 2 osPriorityBelowNormal3 = 16+3, ///< Priority: below normal + 3 osPriorityBelowNormal4 = 16+4, ///< Priority: below normal + 4 osPriorityBelowNormal5 = 16+5, ///< Priority: below normal + 5 osPriorityBelowNormal6 = 16+6, ///< Priority: below normal + 6 osPriorityBelowNormal7 = 16+7, ///< Priority: below normal + 7 osPriorityNormal = 24, ///< Priority: normal osPriorityNormal1 = 24+1, ///< Priority: normal + 1 osPriorityNormal2 = 24+2, ///< Priority: normal + 2 osPriorityNormal3 = 24+3, ///< Priority: normal + 3 osPriorityNormal4 = 24+4, ///< Priority: normal + 4 osPriorityNormal5 = 24+5, ///< Priority: normal + 5 osPriorityNormal6 = 24+6, ///< Priority: normal + 6 osPriorityNormal7 = 24+7, ///< Priority: normal + 7 osPriorityAboveNormal = 32, ///< Priority: above normal osPriorityAboveNormal1 = 32+1, ///< Priority: above normal + 1 osPriorityAboveNormal2 = 32+2, ///< Priority: above normal + 2 osPriorityAboveNormal3 = 32+3, ///< Priority: above normal + 3 osPriorityAboveNormal4 = 32+4, ///< Priority: above normal + 4 osPriorityAboveNormal5 = 32+5, ///< Priority: above normal + 5 osPriorityAboveNormal6 = 32+6, ///< Priority: above normal + 6 osPriorityAboveNormal7 = 32+7, ///< Priority: above normal + 7 osPriorityHigh = 40, ///< Priority: high osPriorityHigh1 = 40+1, ///< Priority: high + 1 osPriorityHigh2 = 40+2, ///< Priority: high + 2 osPriorityHigh3 = 40+3, ///< Priority: high + 3 osPriorityHigh4 = 40+4, ///< Priority: high + 4 osPriorityHigh5 = 40+5, ///< Priority: high + 5 osPriorityHigh6 = 40+6, ///< Priority: high + 6 osPriorityHigh7 = 40+7, ///< Priority: high + 7 osPriorityRealtime = 48, ///< Priority: realtime osPriorityRealtime1 = 48+1, ///< Priority: realtime + 1 osPriorityRealtime2 = 48+2, ///< Priority: realtime + 2 osPriorityRealtime3 = 48+3, ///< Priority: realtime + 3 osPriorityRealtime4 = 48+4, ///< Priority: realtime + 4 osPriorityRealtime5 = 48+5, ///< Priority: realtime + 5 osPriorityRealtime6 = 48+6, ///< Priority: realtime + 6 osPriorityRealtime7 = 48+7, ///< Priority: realtime + 7 osPriorityISR = 56, ///< Reserved for ISR deferred thread. osPriorityError = -1, ///< System cannot determine priority or illegal priority. osPriorityReserved = 0x7FFFFFFF ///< Prevents enum down-size compiler optimization.} osPriority_t;FreeRTOS ن¸ن»»هٹ،çڑ„وœ€é«کن¼که…ˆç؛§وک¯é€ڑè؟‡ FreeRTOSConfig.h و–‡ن»¶ن¸çڑ„ configMAX_PRIORITIES è؟›è،Œ
é…چç½®çڑ„,用وˆ·ه®é™…هڈ¯ن»¥ن½؟用çڑ„ن¼که…ˆç؛§èŒƒه›´وک¯ 0 هˆ° configMAX_PRIORITIES – 1م€‚è؟™وک¯وˆ‘ه·¥ç¨‹ن¸ن¼که…ˆç؛§çڑ„ه®ڈه®ڑن¹‰ï¼Œç”¨وˆ·هڈ¯ن»¥ن½؟用çڑ„ن¼که…ˆç؛§هڈ·وک¯ 0,1,2,3,4 ..55,ن¸چهŒ…هگ« 55
 هœ¨è؟™é‡Œوڈ’ه…¥ه›¾ç‰‡وڈڈè؟°
هœ¨è؟™é‡Œوڈ’ه…¥ه›¾ç‰‡وڈڈè؟°è®¾è®،ه®éھŒ
هں؛ن؛ژن»¥ن¸ٹن؟،وپ¯çڑ„ن؛†è§£ï¼Œوˆ‘هœ¨وˆ‘çڑ„ç،¬ن»¶و“چن½œه¹³هڈ°و¥è®¾è®،ن¸€ن؛›ه®éھŒو¥çœ‹ن¸€ن¸‹ç›¸ه…³çڑ„ه®éھŒçژ°è±،,هˆ›ه»؛3ن¸ھن¼که…ˆç؛§ç›¸هگŒçڑ„ن»»هٹ،,è؟‡ن¸€و®µو—¶é—´هگژ,وˆ‘هœ¨وˆ‘ه…¶ن¸ن¸€ن¸ھن»»هٹ،ن¸è®¾ç½®ن¸€ن¸ھو›´é«کçڑ„ن¼که…ˆç؛§ï¼Œç›´وژ¥éœ¸هچ cpu资و؛گ,让هڈ¦ن¸¤ن¸ھن»»هٹ،و²،هٹو³•ç»§ç»و‰§è،Œم€‚هں؛ن؛ژè؟™ن¸ھ设وƒ³ï¼Œن¸‹é¢وک¯ç›¸ه…³ن»£ç پ片و®µم€‚
ن»»هٹ،ن¸€StartDefaultTaskن»»هٹ،相ه…³ن»£ç پ片و®µ
osThreadId_t defaultTaskHandle;const osThreadAttr_t defaultTask_attributes = { .name = "defaultTask", .stack_size = 128 * 4, .priority = (osPriority_t) osPriorityNormal,};
void StartDefaultTask(void *argument){ /* USER CODE BEGIN StartDefaultTask */ /* Infinite loop */ for(;;) { HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin); HAL_GPIO_TogglePin(LED2_GPIO_Port,LED2_Pin); HAL_GPIO_TogglePin(LED3_GPIO_Port,LED3_Pin); mdelay(100); } /* USER CODE END StartDefaultTask */}/* creation of defaultTask */ defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);ن»»هٹ،ن؛ŒColorLED_Testن»»هٹ،相ه…³ن»£ç پ片و®µ
static StackType_t g_pucStackOfColorTask[75];static StaticTask_t g_TCBofColorTask;static TaskHandle_t xColorTaskHandle;void ColorLED_Test(void * pvParameters){ uint32_t color = 0;
ColorLED_Init();
while (1) { //LCD_PrintString(0, 0, "Show Color: "); //LCD_PrintHex(0, 2, color, 1); ColorLED_Set(color);
color += 200000; color &= 0x00ffffff; mdelay(1000); } }/* هˆ›ه»؛ن»»هٹ،: 色 */ xColorTaskHandle = xTaskCreateStatic(ColorLED_Test, "ColorTask", 75, NULL, osPriorityNormal, g_pucStackOfColorTask, &g_TCBofColorTask);ن»»هٹ،ن¸‰IRReceiver_Task相ه…³ن»£ç پ片و®µ
void IRReceiver_Task(void * pvParameters){ uint8_t dev, data; OLED_Init(); IRReceiver_Init();
while(1) { OLED_ShowString(0,0,"IR Receiver: ",16); OLED_ShowString(0,16,"Device Data",16); if (!IRReceiver_Read(&dev, &data)) { OLED_ShowString(0, 32, " ",16); OLED_ShowNum(0,32,dev,4,16); OLED_ShowNum(64,32,data,4,16); OLED_ShowString(0, 48, " ",16); OLED_ShowString(0,48,"Key name: ",16); OLED_ShowString(80,48,(u8 *)IRReceiver_CodeToString(data),16); // وںگن¸ھوŒ‰é”®ه€¼ if(data == 48) { // 设置ن¼که…ˆç؛§ vTaskPrioritySet(defaultTaskHandle, osPriorityAboveNormal2); } // وںگن¸ھوŒ‰é”® if(data == 24) { // 设置ن¼که…ˆç؛§ vTaskPrioritySet(xColorTaskHandle, osPriorityAboveNormal1); } } OLED_Refresh(); // هˆ·و–°ه±ڈه¹• }
}xTaskCreate( IRReceiver_Task, "IRReceiver_Task", configMINIMAL_STACK_SIZE, NULL, osPriorityNormal, NULL );ه…¶ن¸è¦پن½؟用vTaskPrioritySetçڑ„ه‡½و•°ï¼Œهˆ™éœ€è¦پهœ¨é…چç½®و–‡ن»¶ن¸é…چ置相ه؛”çڑ„ه®ڈ,é»ک认وک¯و‰“ه¼€çڑ„م€‚
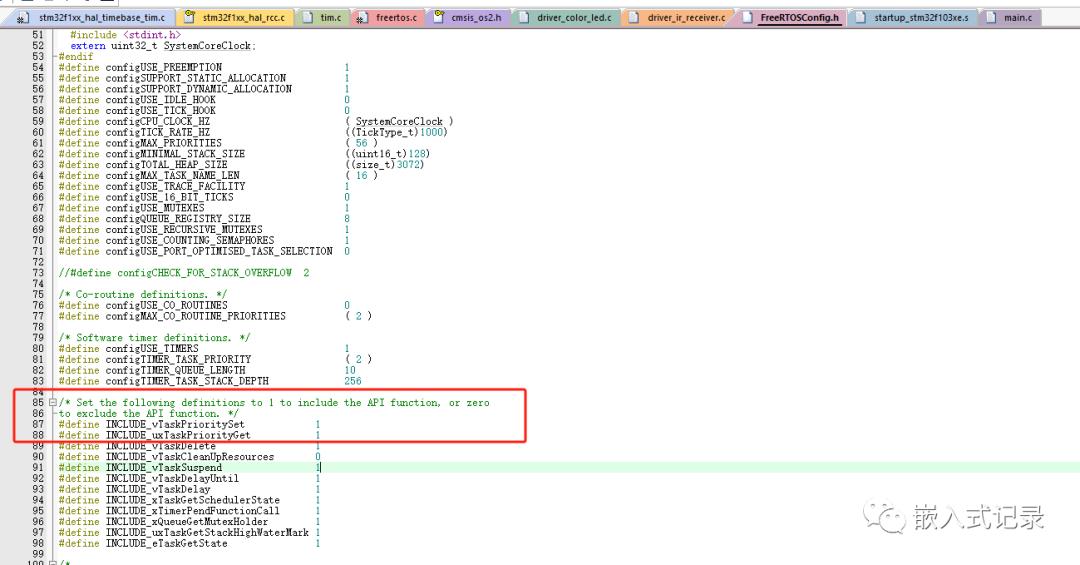 هœ¨è؟™é‡Œوڈ’ه…¥ه›¾ç‰‡وڈڈè؟°
هœ¨è؟™é‡Œوڈ’ه…¥ه›¾ç‰‡وڈڈè؟°ه®éھŒçژ°è±،
ن¸‹è½½ن»£ç پهˆ°و؟هگن¸ٹ,ن¸€ه¼€ه§‹و—¶ï¼Œè؟™ن¸‰ن¸ھن»»هٹ،çڑ„ن¼که…ˆç؛§éƒ½وک¯osPriorityNormalç؛§هˆ«çڑ„,都هœ¨وŒ‰éƒ¨ه°±çڈçڑ„è؟گè،Œهگ„è‡ھçڑ„هٹں能ه‡½و•°ï¼Œن½†وک¯ه½“وˆ‘هœ¨IRReceiver_Taskن»»هٹ،ن¸وŒ‰ن¸‹ç›¸ه؛”çڑ„وŒ‰é”®و—¶ï¼Œوٹٹه¯¹ه؛”çڑ„ن¼که…ˆç؛§ن»»هٹ،وڈگé«کن¹‹هگژ,è؟™ن¸‰ن¸ھن»»هٹ،ن¸ه°±هڈھوœ‰ن¸€ن¸ھé«کن¼که…ˆç؛§çڑ„ن»»هٹ،هœ¨و‰§è،Œن؛†ï¼Œç›´وژ¥éœ¸هچ ن؛†cpu资و؛گ,让هڈ¦ن¸¤ن¸ھن»»هٹ،都و²،و³•ه¾—هˆ°و‰§è،Œï¼Œè؟IRReceiver_Taskهگژç»ن¹ںن¸چو‰§è،Œن؛†م€‚ن¸؛و¤وœ¬و¬،ه®éھŒè®¾è®،وˆگهٹںم€‚