FreeRTOSеӯҰд№ з¬¬2зҜҮ--еҲӣе»әд»»еҠЎпјҲеҠЁжҖҒж–№жі•е’ҢйқҷжҖҒж–№жі•пјү
дёҖгҖҒзӨәдҫӢеҠҹиғҪ
еҹәдәҺжҲ‘зҺ°жңүзҡ„硬件пјҢе®ҢжҲҗдёҖдёӘеӨҡд»»еҠЎзҡ„зј–зЁӢгҖӮеңЁжң¬ж¬ЎзӨәдҫӢдёӯпјҢеҲӣе»әдәҶ4дёӘд»»еҠЎгҖӮ4дёӘд»»еҠЎеҲҶеҲ«жҳҜпјҡStartDefaultTaskгҖҒColorLED_TestгҖҒPlayMusicгҖҒIRReceiver_TestгҖӮе…¶дёӯStartDefaultTaskжҳҜзҝ»иҪ¬LEDзҡ„еҖјгҖҒColorLED_TestжҳҜдёҖдёӘе…ЁеҪ©зҡ„зҒҜгҖҒPlayMusicжҳҜдёҖдёӘж— жәҗиңӮйёЈеҷЁж’ӯж”ҫеӯӨеӢҮиҖ…зҡ„д»»еҠЎгҖҒIRReceiver_TestжҳҜдёҖдёӘжҺҘ收зәўеӨ–з ҒеҖјзҡ„д»»еҠЎгҖӮ
дәҢгҖҒStartDefaultTaskд»»еҠЎжәҗз Ғ
void StartDefaultTask(void *argument){ /* USER CODE BEGIN StartDefaultTask */ /* Infinite loop */ for(;;) { HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin); HAL_GPIO_TogglePin(LED2_GPIO_Port,LED2_Pin); HAL_GPIO_TogglePin(LED3_GPIO_Port,LED3_Pin); mdelay(100); } /* USER CODE END StartDefaultTask */}дёүгҖҒColorLED_Testд»»еҠЎжәҗз Ғ
void ColorLED_Test(void * pvParameters){ uint32_t color = 0;
ColorLED_Init();
while (1) { //LCD_PrintString(0, 0, "Show Color: "); //LCD_PrintHex(0, 2, color, 1); ColorLED_Set(color);
color += 200000; color &= 0x00ffffff; mdelay(1000); } }еӣӣгҖҒPlayMusicд»»еҠЎжәҗз Ғ
void MUSIC_Analysis(void){ uint16_t MusicBeatNum = ((((sizeof(Music_Lone_Brave))/2)/3)-1); uint16_t MusicSpeed = Music_Lone_Brave[0][2]; for(uint16_t i = 1;i<=MusicBeatNum;i++){ //BSP_Buzzer_SetFrequency(Tone_Index[Music_Lone_Brave[i][0]][Music_Lone_Brave[i][1]]); PassiveBuzzer_Set_Freq_Duty(Tone_Index[Music_Lone_Brave[i][0]][Music_Lone_Brave[i][1]], 50); //HAL_Delay(MusicSpeed/Music_Lone_Brave[i][2]); mdelay(MusicSpeed/Music_Lone_Brave[i][2]); }}
void PlayMusic(void *params){ PassiveBuzzer_Init(); while (1) { MUSIC_Analysis(); }}дә”гҖҒIRReceiver_Testд»»еҠЎжәҗз Ғ
void IRReceiver_Test(void * pvParameters){ uint8_t dev, data; OLED_Init(); IRReceiver_Init();
while(1) { OLED_ShowString(0,0,"IR Receiver: ",16); OLED_ShowString(0,16,"Device Data",16); if (!IRReceiver_Read(&dev, &data)) { OLED_ShowString(0, 32, " ",16); OLED_ShowNum(0,32,dev,4,16); OLED_ShowNum(64,32,data,4,16); OLED_ShowString(0, 48, " ",16); OLED_ShowString(0,48,"Key name: ",16); OLED_ShowString(80,48,(u8 *)IRReceiver_CodeToString(data),16); } OLED_Refresh(); // еҲ·ж–°еұҸ幕 }
}е…ӯгҖҒеҲӣе»әд»»еҠЎ
 еҲӣе»әд»»еҠЎ
еҲӣе»әд»»еҠЎзӣёе…іеҠҹиғҪзҡ„д»Јз ҒзүҮж®ө
/* USER CODE BEGIN Header *//** ****************************************************************************** * File Name : freertos.c * Description : Code for freertos applications ****************************************************************************** * @attention * * <h2><center>В© Copyright (c) 2023 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under Ultimate Liberty license * SLA0044, the "License"; You may not use this file except in compliance with * the License. You may obtain a copy of the License at: * www.st.com/SLA0044 * ****************************************************************************** *//* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
/* Private includes ----------------------------------------------------------*//* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*//* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*//* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*//* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*//* USER CODE BEGIN Variables */
static StackType_t g_pucStackOfColorTask[128];static StaticTask_t g_TCBofColorTask;static TaskHandle_t xColorTaskHandle;
/* USER CODE END Variables *//* Definitions for defaultTask */osThreadId_t defaultTaskHandle;const osThreadAttr_t defaultTask_attributes = { .name = "defaultTask", .stack_size = 128 * 4, .priority = (osPriority_t) osPriorityNormal,};
/* Private function prototypes -----------------------------------------------*//* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void *argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/** * @brief FreeRTOS initialization * @param None * @retval None */void MX_FREERTOS_Init(void) { /* USER CODE BEGIN Init */ TaskHandle_t xSoundTaskHandle; BaseType_t ret; /* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */ /* add mutexes, ... */ /* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */ /* add semaphores, ... */ /* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */ /* start timers, add new ones, ... */ /* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */ /* add queues, ... */ /* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */ /* creation of defaultTask */ defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);
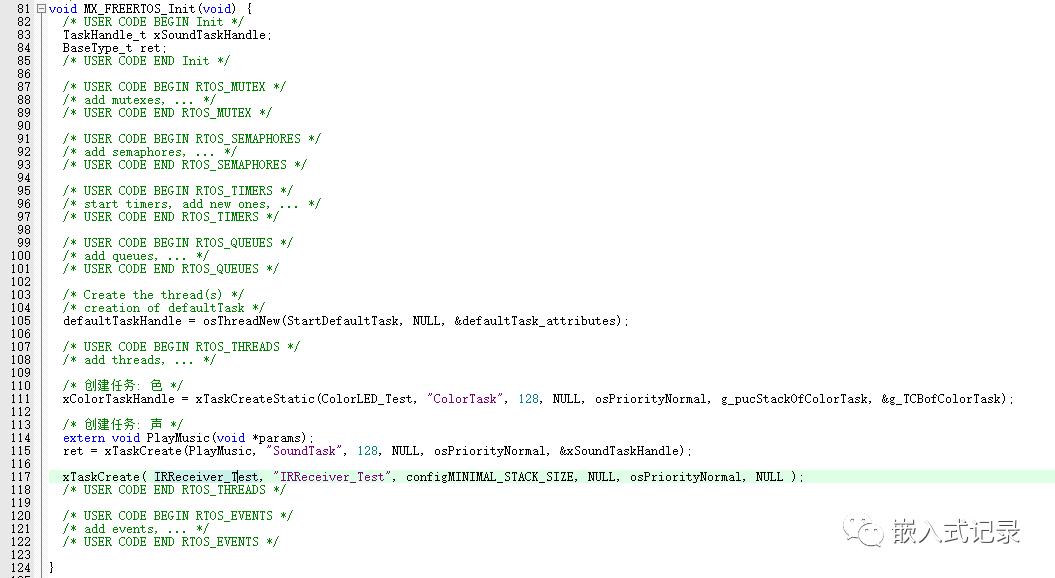
/* USER CODE BEGIN RTOS_THREADS */ /* add threads, ... */ /* еҲӣе»әд»»еҠЎ: иүІ */ xColorTaskHandle = xTaskCreateStatic(ColorLED_Test, "ColorTask", 128, NULL, osPriorityNormal, g_pucStackOfColorTask, &g_TCBofColorTask); /* еҲӣе»әд»»еҠЎ: еЈ° */ extern void PlayMusic(void *params); ret = xTaskCreate(PlayMusic, "SoundTask", 128, NULL, osPriorityNormal, &xSoundTaskHandle); xTaskCreate( IRReceiver_Test, "IRReceiver_Test", configMINIMAL_STACK_SIZE, NULL, osPriorityNormal, NULL ); /* USER CODE END RTOS_THREADS */
/* USER CODE BEGIN RTOS_EVENTS */ /* add events, ... */ /* USER CODE END RTOS_EVENTS */
}
/* USER CODE BEGIN Header_StartDefaultTask *//** * @brief Function implementing the defaultTask thread. * @param argument: Not used * @retval None *//* USER CODE END Header_StartDefaultTask */void StartDefaultTask(void *argument){ /* USER CODE BEGIN StartDefaultTask */ /* Infinite loop */ for(;;) { HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin); HAL_GPIO_TogglePin(LED2_GPIO_Port,LED2_Pin); HAL_GPIO_TogglePin(LED3_GPIO_Port,LED3_Pin); mdelay(100); } /* USER CODE END StartDefaultTask */}
/* Private application code --------------------------------------------------*//* USER CODE BEGIN Application */
/* USER CODE END Application */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
xTaskCreate еҲӣе»ә
дҪҝз”Ё xTaskCreate еҮҪж•°жҳҜеңЁ FreeRTOS дёӯеҲӣе»әд»»еҠЎзҡ„дёҖз§Қж–№жі•пјҢеҮҪж•°еҺҹеһӢеҰӮдёӢпјҡ
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode, const char * const pcName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */ const configSTACK_DEPTH_TYPE usStackDepth, void * const pvParameters, UBaseType_t uxPriority, TaskHandle_t * const pxCreatedTask )1.TaskFunction_t pvTaskCodeпјҡд»»еҠЎеҮҪж•°зҡ„жҢҮй’ҲгҖӮиҝҷдёӘеҸӮж•°жҳҜдёҖдёӘеҮҪж•°жҢҮй’ҲпјҢжҢҮеҗ‘дёҖдёӘд»»еҠЎзҡ„е®һйҷ…жү§иЎҢд»Јз ҒгҖӮд»»еҠЎеҮҪж•°зҡ„еҺҹеһӢеҝ…йЎ»з¬ҰеҗҲ TaskFunction_t зұ»еһӢпјҢеҚі void func(void *pvParameters)пјҢе…¶дёӯ pvParameters жҳҜдёҖдёӘжҢҮеҗ‘е’Ңд»»еҠЎзӣёе…ізҡ„еҸӮж•°зҡ„жҢҮй’ҲгҖӮ
2.const char * const pcNameпјҡд»»еҠЎзҡ„еҗҚз§°гҖӮиҝҷдёӘеҸӮж•°жҳҜдёҖдёӘеӯ—з¬ҰдёІеёёйҮҸпјҢз”ЁдәҺж ҮиҜҶд»»еҠЎгҖӮ
3.const configSTACK_DEPTH_TYPE usStackDepthпјҡд»»еҠЎж Ҳзҡ„еӨ§е°ҸгҖӮиҝҷдёӘеҸӮж•°иЎЁзӨәд»»еҠЎж Ҳзҡ„ж·ұеәҰгҖҒз©әй—ҙжҲ–иҖ…еӨ§е°ҸпјҢеҚ•дҪҚжҳҜworldпјҢд№ҹе°ұжҳҜжҢү4 еӯ—иҠӮжқҘз®—гҖӮеңЁеҲӣе»әд»»еҠЎж—¶йңҖиҰҒжҸҗдҫӣдёҖдёӘи¶іеӨҹеӨ§зҡ„е Ҷж Ҳд»ҘзЎ®дҝқд»»еҠЎеҸҜд»ҘиҝҗиЎҢгҖӮ
4.void * const pvParametersпјҡд»»еҠЎеҸӮж•°зҡ„жҢҮй’ҲгҖӮиҝҷдёӘеҸӮж•°жҳҜд»»еҠЎзҡ„е®һйҷ…еҸӮж•°пјҢе®ғзҡ„зұ»еһӢеҸҜд»ҘжҳҜ void жҢҮй’ҲжҲ–иҖ…е…¶д»–д»»ж„Ҹзұ»еһӢзҡ„жҢҮй’ҲгҖӮеңЁд»»еҠЎжү§иЎҢж—¶пјҢеҸҜд»ҘйҖҡиҝҮжӯӨеҸӮж•°жқҘдј йҖ’д»»еҠЎйңҖиҰҒзҡ„еҸӮж•°гҖӮ
5.UBaseType_t uxPriorityпјҡд»»еҠЎзҡ„дјҳе…Ҳзә§гҖӮиҝҷдёӘеҸӮж•°з”ЁдәҺжҢҮе®ҡд»»еҠЎзҡ„дјҳе…Ҳзә§пјҢж•°еҖји¶ҠеӨ§иЎЁзӨәдјҳе…Ҳзә§и¶Ҡй«ҳгҖӮдјҳе…Ҳзә§зҡ„еҸ–еҖјиҢғеӣҙж №жҚ®йҮҸеҢ–ж•°еҖјзҡ„дҪҚж•°иҖҢе®ҡпјҢеҸҜд»ҘеңЁcmsis_os2.hзҡ„ж–Ү件дёӯзңӢеҲ°е…ідәҺдјҳе…Ҳзә§зҡ„жһҡдёҫ
/// Priority values.typedef enum { osPriorityNone = 0, ///< No priority (not initialized). osPriorityIdle = 1, ///< Reserved for Idle thread. osPriorityLow = 8, ///< Priority: low osPriorityLow1 = 8+1, ///< Priority: low + 1 osPriorityLow2 = 8+2, ///< Priority: low + 2 osPriorityLow3 = 8+3, ///< Priority: low + 3 osPriorityLow4 = 8+4, ///< Priority: low + 4 osPriorityLow5 = 8+5, ///< Priority: low + 5 osPriorityLow6 = 8+6, ///< Priority: low + 6 osPriorityLow7 = 8+7, ///< Priority: low + 7 osPriorityBelowNormal = 16, ///< Priority: below normal osPriorityBelowNormal1 = 16+1, ///< Priority: below normal + 1 osPriorityBelowNormal2 = 16+2, ///< Priority: below normal + 2 osPriorityBelowNormal3 = 16+3, ///< Priority: below normal + 3 osPriorityBelowNormal4 = 16+4, ///< Priority: below normal + 4 osPriorityBelowNormal5 = 16+5, ///< Priority: below normal + 5 osPriorityBelowNormal6 = 16+6, ///< Priority: below normal + 6 osPriorityBelowNormal7 = 16+7, ///< Priority: below normal + 7 osPriorityNormal = 24, ///< Priority: normal osPriorityNormal1 = 24+1, ///< Priority: normal + 1 osPriorityNormal2 = 24+2, ///< Priority: normal + 2 osPriorityNormal3 = 24+3, ///< Priority: normal + 3 osPriorityNormal4 = 24+4, ///< Priority: normal + 4 osPriorityNormal5 = 24+5, ///< Priority: normal + 5 osPriorityNormal6 = 24+6, ///< Priority: normal + 6 osPriorityNormal7 = 24+7, ///< Priority: normal + 7 osPriorityAboveNormal = 32, ///< Priority: above normal osPriorityAboveNormal1 = 32+1, ///< Priority: above normal + 1 osPriorityAboveNormal2 = 32+2, ///< Priority: above normal + 2 osPriorityAboveNormal3 = 32+3, ///< Priority: above normal + 3 osPriorityAboveNormal4 = 32+4, ///< Priority: above normal + 4 osPriorityAboveNormal5 = 32+5, ///< Priority: above normal + 5 osPriorityAboveNormal6 = 32+6, ///< Priority: above normal + 6 osPriorityAboveNormal7 = 32+7, ///< Priority: above normal + 7 osPriorityHigh = 40, ///< Priority: high osPriorityHigh1 = 40+1, ///< Priority: high + 1 osPriorityHigh2 = 40+2, ///< Priority: high + 2 osPriorityHigh3 = 40+3, ///< Priority: high + 3 osPriorityHigh4 = 40+4, ///< Priority: high + 4 osPriorityHigh5 = 40+5, ///< Priority: high + 5 osPriorityHigh6 = 40+6, ///< Priority: high + 6 osPriorityHigh7 = 40+7, ///< Priority: high + 7 osPriorityRealtime = 48, ///< Priority: realtime osPriorityRealtime1 = 48+1, ///< Priority: realtime + 1 osPriorityRealtime2 = 48+2, ///< Priority: realtime + 2 osPriorityRealtime3 = 48+3, ///< Priority: realtime + 3 osPriorityRealtime4 = 48+4, ///< Priority: realtime + 4 osPriorityRealtime5 = 48+5, ///< Priority: realtime + 5 osPriorityRealtime6 = 48+6, ///< Priority: realtime + 6 osPriorityRealtime7 = 48+7, ///< Priority: realtime + 7 osPriorityISR = 56, ///< Reserved for ISR deferred thread. osPriorityError = -1, ///< System cannot determine priority or illegal priority. osPriorityReserved = 0x7FFFFFFF ///< Prevents enum down-size compiler optimization.} osPriority_t;6.TaskHandle_t * const pxCreatedTaskпјҡз”ЁдәҺиҝ”еӣһеҲӣе»әзҡ„д»»еҠЎзҡ„еҸҘжҹ„гҖӮеҲӣе»әд»»еҠЎжҲҗеҠҹеҗҺпјҢзі»з»ҹе°Ҷиҝ”еӣһдёҖдёӘжҢҮеҗ‘иҜҘд»»еҠЎзҡ„д»»еҠЎеҸҘжҹ„гҖӮ
xTaskCreateStaticеҲӣе»ә
дҪҝз”Ё xTaskCreateStatic() еҮҪж•°йқҷжҖҒеҲӣе»әд»»еҠЎгҖӮиҜҘеҮҪж•°дёҺ xTaskCreate() зұ»дјјпјҢдҪҶе®ғдҪҝз”ЁйқҷжҖҒеҲҶй…Қзҡ„д»»еҠЎжҺ§еҲ¶еқ—е’Ңе Ҷж Ҳз©әй—ҙпјҢиҖҢдёҚжҳҜеңЁиҝҗиЎҢж—¶еҠЁжҖҒеҲҶй…ҚгҖӮеҮҪж•°еҺҹеһӢеҰӮдёӢпјҡ
TaskHandle_t xTaskCreateStatic( TaskFunction_t pxTaskCode, const char * const pcName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */ const uint32_t ulStackDepth, void * const pvParameters, UBaseType_t uxPriority, StackType_t * const puxStackBuffer, StaticTask_t * const pxTaskBuffer )йҖҡиҝҮйқҷжҖҒеҲӣе»әж–№ејҸпјҢеҸҜд»ҘдҪҝз”Ёзј–иҜ‘еҷЁзҡ„еҶ…еӯҳеҲҶй…ҚеҷЁжқҘеҲҶй…Қд»»еҠЎжүҖйңҖзҡ„еҶ…еӯҳз©әй—ҙпјҢд»ҺиҖҢйҒҝе…ҚдәҶеҠЁжҖҒеҲҶй…ҚеҶ…еӯҳзҡ„ејҖй”Җе’ҢжҪңеңЁзҡ„еҶ…еӯҳжі„жјҸй—®йўҳгҖӮйқҷжҖҒеҲӣе»әж–№ејҸиҝҳеҸҜд»ҘеңЁдёҖдәӣеҜ№еҶ…еӯҳдҪҝз”ЁжңүйҷҗеҲ¶зҡ„еңәеҗҲдёӢжңүж•Ҳең°з®ЎзҗҶзі»з»ҹиө„жәҗпјҢжҸҗй«ҳзі»з»ҹзҡ„зЁіе®ҡжҖ§е’ҢжҖ§иғҪгҖӮ
е®һйӘҢзҺ°иұЎпјҡ
еңЁжҲ‘зҡ„硬件дёҠLEDзҒҜжӯЈеёёзҝ»иҪ¬пјҢе…ЁеҪ©зҒҜжӯЈеёёй—ӘеҲ·пјҢж— жәҗиңӮйёЈеҷЁжӯЈеёёзҡ„ж’ӯж”ҫеЈ°йҹіпјҢзәўеӨ–жҺҘ收任еҠЎиғҪжӯЈеёёжҺҘ收зәўеӨ–еҖјгҖӮ
еҸӮиҖғиө„жәҗпјҡ
https://rtos.100ask.net/zh/FreeRTOS/DShanMCU-F103/chapter9.html
https://www.bilibili.com/video/BV1Jw411i7Fz?p=16&vd_source=cc94aa2e05dfbf63745cf6a66a174b2f