жң¬ж–Үзӣ®ж ҮпјҡеҹәдәҺHALеә“зҡ„stm32е‘јеҗёзҒҜе®һйӘҢ
жҢүз…§жң¬ж–Үзҡ„жҸҸиҝ°пјҢеә”иҜҘеҸҜд»ҘеңЁдҪ жүҖеӨ„зҡ„硬件дёҠи°ғйҖҡд»Јз ҒгҖӮ
е…ҲеҶіжқЎд»¶пјҡиЈ…жңүзј–иҜ‘е’ҢйӣҶжҲҗзҡ„ејҖеҸ‘зҺҜеўғпјҢжҜ”еҰӮпјҡKeil uVision5гҖӮ
жқҝеӯҗ硬件иҰҒжұӮпјҡи®ҫи®ЎдәҶLEDеңЁе®ҡж—¶еҷЁзҡ„жҺҘеҸЈдёҠ
е‘јеҗёзҒҜжҳҜдёҖз§Қеёёи§Ғзҡ„з”өеӯҗеҲ¶дҪңе®һйӘҢйЎ№зӣ®пјҢе…¶йҖҡиҝҮжҺ§еҲ¶ LED зҒҜзҡ„дә®еәҰеҸҳеҢ–пјҢе®һзҺ°дәҶдёҖз§ҚжЁЎжӢҹдәәзұ»е‘јеҗёзҡ„ж•ҲжһңгҖӮдҪңдёәдёҖз§Қеёёи§Ғзҡ„ж•°еӯ—и°ғе…үжҠҖжңҜпјҢе‘јеҗёзҒҜе№ҝжіӣеә”з”ЁдәҺе·ҘдёҡжҺ§еҲ¶гҖҒжҷәиғҪ家еұ…зӯүйўҶеҹҹгҖӮиҖҢеңЁжӯӨиҝҮзЁӢдёӯпјҢдҪҝз”Ёеҫ®жҺ§еҲ¶еҷЁеҰӮ STM32 пјҢеҲҷеҸҜд»ҘжӣҙеҠ дҫҝжҚ·гҖҒзҒөжҙ»ең°е®һзҺ°е‘јеҗёзҒҜзҡ„жҺ§еҲ¶гҖӮеӣ жӯӨпјҢжң¬ж–Үе°Ҷд»Ӣз»ҚеҹәдәҺ STM32 зҡ„е‘јеҗёзҒҜе®һйӘҢпјҢйҖҡиҝҮд»Јз Ғзј–еҶҷгҖҒзј–иҜ‘дёӢиҪҪе’Ңи°ғиҜ•иҝҗиЎҢпјҢе®һзҺ°дәҶдёҖдёӘз®ҖеҚ•зҡ„е‘јеҗёзҒҜжҺ§еҲ¶зі»з»ҹгҖӮ
е®һйӘҢзӣ®зҡ„
жң¬е®һйӘҢж—ЁеңЁйҖҡиҝҮ STM32 зҡ„е‘јеҗёзҒҜе®һйӘҢпјҢжҺҢжҸЎ STM32 зҡ„зј–зЁӢж–№жі•е’Ңи°ғиҜ•жҠҖе·§пјҢ并ж·ұе…ҘзҗҶи§Је‘јеҗёзҒҜзҡ„еҺҹзҗҶгҖҒи°ғе…үжҠҖжңҜе’Ңе‘ЁжңҹжҺ§еҲ¶зӯүзҹҘиҜҶзӮ№гҖӮеңЁжң¬е®һйӘҢиҝҮзЁӢдёӯпјҢжҲ‘们е°Ҷж¶үеҸҠ STM32 зҡ„ GPIO з«ҜеҸЈй…ҚзҪ®гҖҒе®ҡж—¶еҷЁе’Ң PWM зҡ„дҪҝз”ЁгҖҒж—¶й’ҹй…ҚзҪ®е’Ңдёӯж–ӯеӨ„зҗҶзӯүжҠҖжңҜ
PWMд»Ӣз»Қ
PWMпјҲPulse Width ModulationпјүеҚіи„үеҶІе®ҪеәҰи°ғеҲ¶жҠҖжңҜпјҢжҳҜдёҖз§ҚйҖҡиҝҮи°ғиҠӮи„үеҶІдҝЎеҸ·зҡ„еҚ з©әжҜ”жқҘе®һзҺ°жЁЎжӢҹдҝЎеҸ·зҡ„и°ғиҠӮзҡ„жҠҖжңҜгҖӮеңЁPWMжҺ§еҲ¶дёӯпјҢе‘ЁжңҹжҖ§зҡ„ж–№жіўз§°дёәPWMжіўпјҢе…¶еҚ з©әжҜ”жҳҜжҢҮй«ҳз”өе№іж—¶й—ҙдёҺе‘Ёжңҹзҡ„жҜ”еҖјгҖӮPWMжіўдҝЎеҸ·еҸҜд»ҘйҖҡиҝҮжҺ§еҲ¶з”өи·Ҝзҡ„иҫ“еҮәз”өе№іжқҘе®һзҺ°еҜ№еӨ–и®ҫзҡ„жҺ§еҲ¶пјҢеҰӮеҜ№LEDзҡ„дә®еәҰгҖҒз”өжңәзҡ„иҪ¬йҖҹзӯүгҖӮйҖҡеёёдҪҝз”Ёе®ҡж—¶еҷЁжЁЎеқ—жқҘз”ҹжҲҗPWMжіўпјҢе®ҡж—¶еҷЁеңЁжҜҸдёӘе‘ЁжңҹеҶ…еҸ‘еҮәеӣәе®ҡзҡ„ж—¶й—ҙй—ҙйҡ”дёӯж–ӯпјҢж №жҚ®и®ҫе®ҡзҡ„еҚ з©әжҜ”пјҢжҜҸдёӘе‘ЁжңҹеҶ…зҡ„й«ҳз”өе№іж—¶й—ҙе’ҢдҪҺз”өе№іж—¶й—ҙдёҚеҗҢпјҢд»ҺиҖҢе®һзҺ°еҜ№PWMжіўзҡ„жҺ§еҲ¶гҖӮ
еҹәзЎҖе·ҘзЁӢ
дҪҝз”ЁSTM32CubeMXй…ҚзҪ®stm32зҡ„еҹәжң¬й…ҚзҪ®гҖӮеҹәжң¬зҡ„й…ҚзҪ®еҰӮдёӢпјҡејҖеҗҜswdи°ғиҜ•пјҢејҖеҗҜеӨ–йғЁж—¶й’ҹпјҢй…ҚзҪ®зӣёеә”зҡ„е®ҡж—¶еҷЁгҖӮ
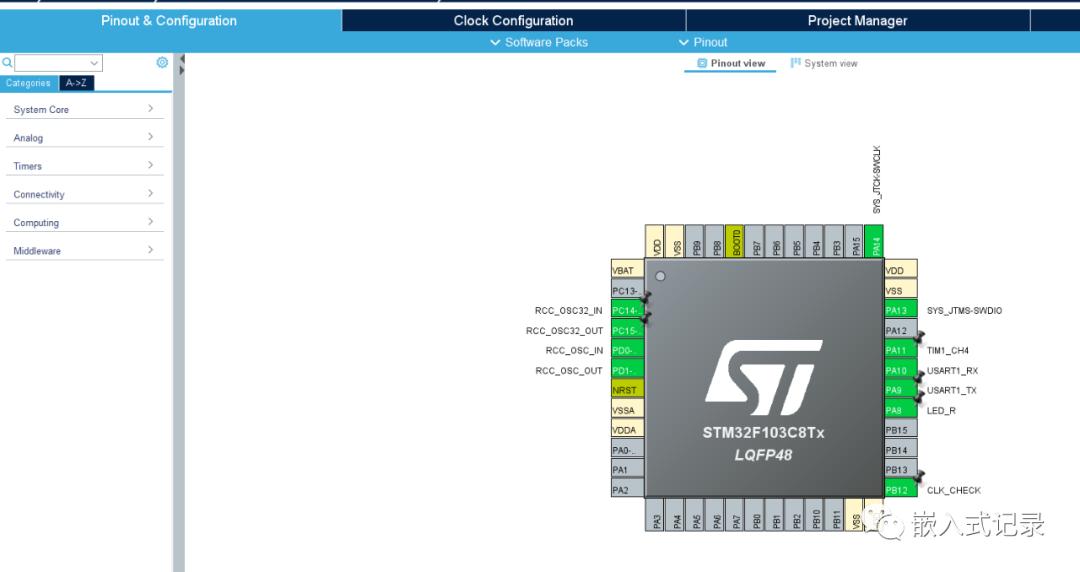
е‘јеҗёзҒҜиҝһжҺҘзҡ„硬件е®ҡж—¶еҷЁй…ҚзҪ®

ж—¶й’ҹз•ҢйқўйҖүйЎ№еҚЎпјҡ

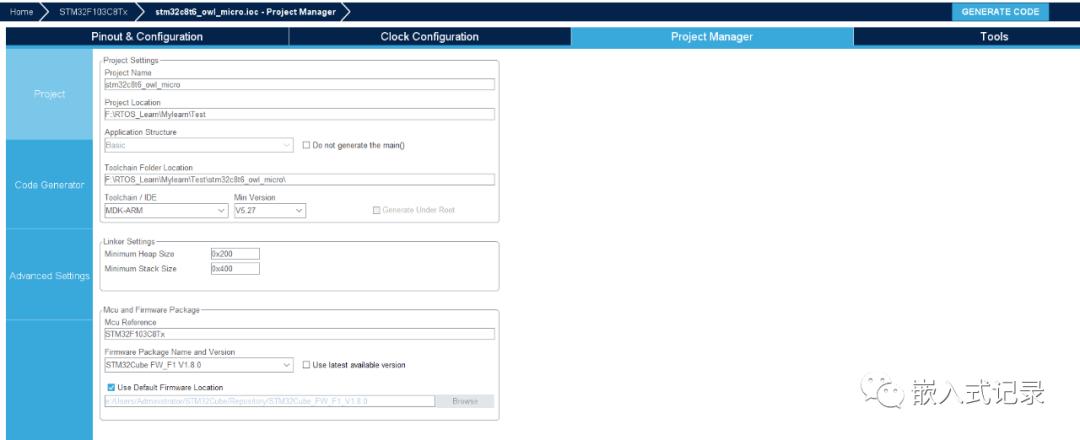
е·ҘзЁӢйҖүйЎ№еҚЎпјҡ
зӮ№еҮ»еҸідёҠи§’зҡ„зҡ„з”ҹжҲҗд»Јз Ғпјҡ

дҪҝз”Ёkeilжү“ејҖе·ҘзЁӢпјҢзј–иҜ‘е·ҘзЁӢпјҢдёҖеҲҮйғҪжҳҜok

дё»иҰҒд»Јз Ғ
е…¶дёӯжҲ‘е®ҡж—¶еҷЁй…ҚзҪ®дәҶ200hzзҡ„йў‘зҺҮпјҢиӮүзңји§ӮеҜҹжҳҺжҳҫдёҖдәӣпјҢдё»еҮҪж•°дёӯж”№еҸҳеҚ з©әжҜ”гҖӮ
/* TIM1 init function */void MX_TIM1_Init(void){
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0}; TIM_MasterConfigTypeDef sMasterConfig = {0}; TIM_OC_InitTypeDef sConfigOC = {0}; TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */ htim1.Instance = TIM1; htim1.Init.Prescaler = 720-1; // еҲҶйў‘720 100khz 10usи®ЎдёҖж•° htim1.Init.CounterMode = TIM_COUNTERMODE_UP; htim1.Init.Period = 500-1; // и®Ўж•°500ж¬Ў 500*10 = 5000us = 5ms = 200hz htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim1.Init.RepetitionCounter = 0; htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim1) != HAL_OK) { Error_Handler(); } sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK) { Error_Handler(); } if (HAL_TIM_PWM_Init(&htim1) != HAL_OK) { Error_Handler(); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK) { Error_Handler(); } sConfigOC.OCMode = TIM_OCMODE_PWM1; sConfigOC.Pulse = 0; sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET; sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET; if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_4) != HAL_OK) { Error_Handler(); } sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE; sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE; sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF; sBreakDeadTimeConfig.DeadTime = 0; sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE; sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH; sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE; if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */ HAL_TIM_MspPostInit(&htim1);
}mainеҮҪж•°
int main(void){ /* USER CODE BEGIN 1 */ //е®ҡд№үдёҖдёӘеҸҳйҮҸз”ЁжқҘеӯҳеӮЁжҜ”иҫғеҖј uint16_t pulse = 0; //е®ҡд№үдёҖдёӘеҸҳйҮҸз”ЁжқҘеӯҳеӮЁж–№еҗ‘пјҢ0иЎЁзӨәйҖ’еўһпјҢ1иЎЁзӨәйҖ’еҮҸ uint8_t dir = 0; /* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */ SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */ MX_GPIO_Init(); MX_USART1_UART_Init(); MX_TIM2_Init(); MX_TIM1_Init(); /* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_4); /* USER CODE END 2 */
/* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */
/* USER CODE BEGIN 3 */ //ж №жҚ®ж–№еҗ‘еҲӨж–ӯжҳҜйҖ’еўһиҝҳжҳҜйҖ’еҮҸ if (dir == 0) { //延时10жҜ«з§’ HAL_Delay(10); //жҜ”иҫғеҖјеҠ дёҖ pulse++; //и®ҫзҪ®жҜ”иҫғеҖј __HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4, pulse); //еҰӮжһңжҜ”иҫғеҖјиҫҫеҲ°жңҖеӨ§еҖј499пјҢе°ұж”№еҸҳж–№еҗ‘дёәйҖ’еҮҸ if (pulse == 499) { dir = 1; } } else if (dir == 1) { //延时10жҜ«з§’ HAL_Delay(10); //жҜ”иҫғеҖјеҮҸдёҖ pulse--; //и®ҫзҪ®жҜ”иҫғеҖј __HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_4, pulse); //еҰӮжһңжҜ”иҫғеҖјиҫҫеҲ°жңҖе°ҸеҖј0пјҢе°ұж”№еҸҳж–№еҗ‘дёәйҖ’еўһ if (pulse == 0) { dir = 0; } } } /* USER CODE END 3 */}е®һйӘҢзҺ°иұЎ
иғҪеңЁжҲ‘зҡ„硬件дёҠе®һзҺ°е‘јеҗёзҒҜзҡ„ж•ҲжһңгҖӮ
жң¬ж–Үе®ҢпјҒ