
REventBusиғҢжҷҜ
еңЁе®һйҷ…зҡ„йЎ№зӣ®ејҖеҸ‘дёӯпјҢз»ҸеёёдјҡйҒҮеҲ°дёҡеҠЎдёҺдёҡеҠЎпјҢ组件дёҺ组件пјҢдёҡеҠЎдёҺ组件д№Ӣй—ҙзҡ„йҖҡдҝЎпјҢдёҫдёӘдҫӢеӯҗпјҡеҪ“жңүзғҹйӣҫдј ж„ҹеҷЁжЈҖжөӢеҲ°зғҹйӣҫи¶…ж Үж—¶пјҢйңҖиҰҒжү“ејҖжҺ’ж°”жүҮжҺ’ж°”пјҢеҗҢж—¶жҳҫзӨәзғҹйӣҫжө“еәҰжҳҫзӨәеҲ°жҳҫзӨәеҷЁдёӯпјҢдҫӣз®ЎзҗҶдәәе‘ҳжЈҖи§ҶгҖӮеӨ„зҗҶиҝҷж ·зҡ„йҖ»иҫ‘жңүеҮ з§Қзӯ–з•ҘгҖӮеҰӮдёӢпјҡ
д»ҘдёҠдёӨз§Қзӯ–з•ҘйғҪеӯҳеңЁеҫҲеӨ§зҡ„й—®йўҳпјҢй—®йўҳеҲҶжһҗпјҡ
з»јдёҠжүҖиҝ°пјҡдёәдәҶиғҪеӨҹи§ЈеҶідёҠйқўзҡ„й—®йўҳпјҢREventBus组件еә”иҝҗиҖҢз”ҹгҖӮ
REventBusе·ҘдҪңжөҒзЁӢеӣҫи§Ј
PublisherдҪҝз”ЁpublishеҸ‘еҮәigeдёҖдёӘдәӢ件пјҢSubscriberеңЁе…¶еӣһи°ғеҮҪж•°дёӯжҺҘ收дәӢ件гҖӮ
REventBusдҫқиө–组件
дёәдәҶжҸҗдҫӣжӣҙеҘҪзҡ„组件еҢ–пјҢйЈҺзҒ«иҪ®з§‘жҠҖ е’ҢгҖҠRiceеөҢе…ҘејҸејҖеҸ‘жҠҖжңҜеҲҶдә«гҖӢе…¬дј—еҸ·иҒ”еҗҲжҺЁеҮәR组件йӣҶпјҢREventbus组件е°ұжҳҜR组件йӣҶзҡ„е…¶дёӯдёҖе‘ҳпјҢ组件дёҺ组件д№ӢеҗҺеӯҳеңЁдҫқиө–е…ізі». REventBus组件еҗҢж ·дҫқиө–дёҖдәӣ组件пјҢеҰӮдёӢпјҡ
REventBusзҡ„дҪҝз”Ё
- REventBusж•ҙдҪ“еҢ…еҗ«5йғЁеҲҶпјҡSubscribeпјҢPublishпјҢEventпјҢEventCbпјҢBrokerгҖӮ
- Subscribe --и®ўйҳ…иҖ…и®ўйҳ…иҮӘе·ұйңҖиҰҒзӣ‘еҗ¬зҡ„дәӢ件жҺҘеҸЈгҖӮ
- Publish --еҸ‘еёғиҖ…еҸ‘еёғдәӢ件пјҢе®ғж”ҜжҢҒеҗҢжӯҘеҸ‘йҖҒе’ҢејӮжӯҘеҸ‘йҖҒгҖӮ
- Event --и®ўйҳ…иҖ…зӣ‘еҗ¬зҡ„дәӢ件пјҢеҸӘжңүеӯҳеңЁи®ўйҳ…дәӢ件пјҢжүҚдјҡжңүдёҺд№ӢеҜ№еә”зҡ„еҸ‘еёғдәӢ件гҖӮ
- EventCb --дәӢ件дә§з”ҹзҡ„еӣһи°ғжҺҘеҸЈпјҢи®ўйҳ…иҖ…жіЁеҶҢпјҢеҸ‘еёғиҖ…еҸ‘еёғеҜ№еә”дәӢ件д№ӢеҗҺдә§з”ҹеӣһи°ғгҖӮ
- Broker --дәӢ件代зҗҶпјҢз®ЎзҗҶдәӢ件注еҶҢпјҢжіЁй”ҖпјҢзӣ‘еҗ¬гҖӮ
| жҺҘеҸЈ | иҜҙжҳҺ |
|---|---|
| reb_init | REventBusеҲқе§ӢеҢ–жҺҘеҸЈ |
| reb_deinit | REventBusеҺ»еҲқе§ӢеҢ–жҺҘеҸЈ |
| reb_subscribe | REventBusи®ўйҳ…дәӢ件жҺҘеҸЈ |
| reb_unsbscribe | REventBusеҸ–ж¶Ҳи®ўйҳ…дәӢ件жҺҘеҸЈ |
| reb_publish | REventBusеҗҢжӯҘеҸ‘еёғдәӢ件жҺҘеҸЈ |
| reb_async_publish | REventBusејӮжӯҘеҸ‘еёғдәӢ件жҺҘеҸЈ |
- REventBusеҲқе§ӢеҢ–жҺҘеҸЈ
pf_err_t reb_init(void);
- REventBusеҺ»еҲқе§ӢеҢ–жҺҘеҸЈ
pf_err_t reb_deinit(void);
- REventBusи®ўйҳ…дәӢ件жҺҘеҸЈ: pf_err_t reb_subscribe(const char *event, reb_handler_cb handler)
| гҖҢеҸӮж•°гҖҚ | гҖҢжҸҸиҝ°гҖҚ |
|---|---|
| event | и®ўйҳ…зҡ„дәӢ件пјҢе…¶жҳҜдёҖдёӘеӯ—з¬ҰдёІзұ»еһӢ |
| handler | дәӢ件еӨ„зҗҶеҮҪж•°пјҢз”ұи®ўйҳ…иҖ…жҸҗдҫӣпјҢдәӢ件дә§з”ҹж—¶еӣһи°ғжӯӨеҮҪж•° |
| гҖҢиҝ”еӣһгҖҚ | вҖ”вҖ” |
| PF_EOK | и®ўйҳ…дәӢ件жҲҗеҠҹ |
| OTher | и®ўйҳ…дәӢ件еӨұиҙҘ |
- REventBusи®ўйҳ…дәӢ件жҺҘеҸЈ: pf_err_t reb_unsbscribe(const char *event, reb_handler_cb handler)
| гҖҢеҸӮж•°гҖҚ | гҖҢжҸҸиҝ°гҖҚ |
|---|---|
| event | и®ўйҳ…зҡ„дәӢ件пјҢе…¶жҳҜдёҖдёӘеӯ—з¬ҰдёІзұ»еһӢ |
| handler | дәӢ件еӨ„зҗҶеҮҪж•°пјҢи®ўйҳ…дәӢ件时жүҖи®ўйҳ…зҡ„еӣһи°ғеҮҪж•° |
| гҖҢиҝ”еӣһгҖҚ | вҖ”вҖ” |
| PF_EOK | еҸ–ж¶Ҳи®ўйҳ…дәӢ件жҲҗеҠҹ |
| OTher | еҸ–ж¶Ҳи®ўйҳ…дәӢ件еӨұиҙҘ |
- REventBusеҗҢжӯҘеҸ‘еёғдәӢ件жҺҘеҸЈпјҡpf_err_t reb_publish(const char *event, void *payload, uint16_t lenght)
| гҖҢеҸӮж•°гҖҚ | гҖҢжҸҸиҝ°гҖҚ |
|---|---|
| event | и®ўйҳ…иҖ…и®ўйҳ…зҡ„дәӢ件зұ»еһӢ |
| payload | еҸ‘еёғдәӢ件зҡ„ж¶ҲжҒҜзұ»еһӢ |
| lenght | еҸ‘еёғдәӢ件зҡ„ж¶ҲжҒҜй•ҝеәҰ |
| гҖҢиҝ”еӣһгҖҚ | вҖ”вҖ” |
| PF_EOK | еҸ‘еёғдәӢ件жҲҗеҠҹ |
| OTher | еҸ‘еёғдәӢ件еӨұиҙҘ |
- REventBusејӮжӯҘеҸ‘еёғдәӢ件жҺҘеҸЈпјҡpf_err_t reb_async_publish(const char *event, reb_priority priority, void *payload, uint16_t lenght)
| гҖҢеҸӮж•°гҖҚ | гҖҢжҸҸиҝ°гҖҚ |
|---|---|
| event | и®ўйҳ…иҖ…и®ўйҳ…зҡ„дәӢ件зұ»еһӢ |
| priority | еҸ‘еёғдәӢ件зҡ„дјҳе…Ҳзә§пјҢREB_PRIORITY_HIGHе’ҢREB_PRIORITY_ORDINARYпјҲзӣ®еүҚжңӘе®һзҺ°пјү |
| payload | еҸ‘еёғдәӢ件зҡ„ж¶ҲжҒҜзұ»еһӢ |
| lenght | еҸ‘еёғдәӢ件зҡ„ж¶ҲжҒҜй•ҝеәҰ |
| гҖҢиҝ”еӣһгҖҚ | вҖ”вҖ” |
| PF_EOK | еҸ‘еёғдәӢ件жҲҗеҠҹ |
| OTher | еҸ‘еёғдәӢ件еӨұиҙҘ |
REventBusжј”зӨә
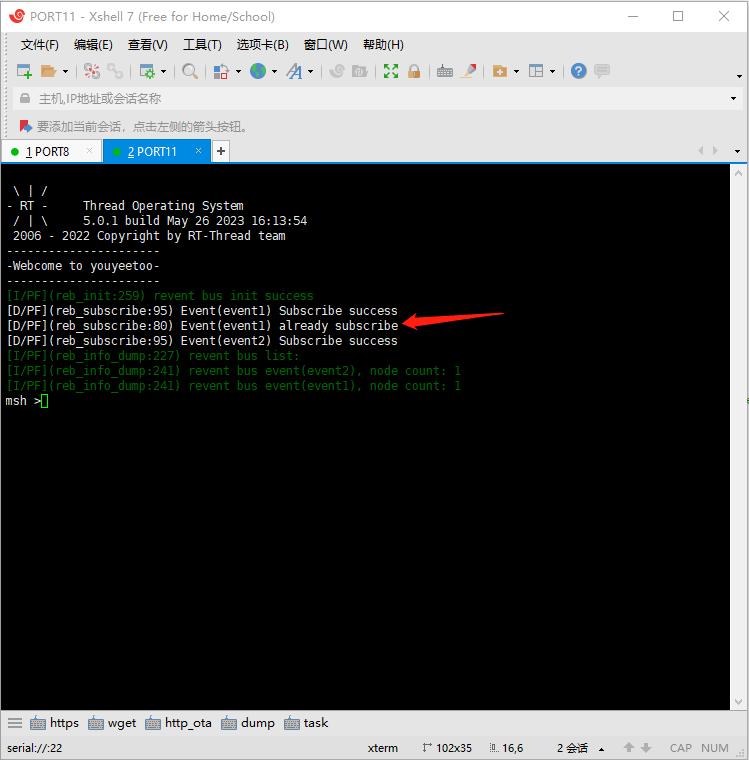
- жіЁж„ҸпјҡеҗҢдёҖдёӘжЁЎеқ—е®ҡд№үеӨҡж¬Ўе®ҡд№үеҗҢдёҖдёӘдәӢ件пјҢеҸӘжңү第дёҖдёӘдәӢ件订йҳ…жңүж•Ҳ
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#include "revent_bus.h"
void reb_handler(const char *event, void *payload, uint16_t lenght)
{
rt_kprintf("Recv: event: %s, payload: %.*s\r\n", event, lenght, payload);
}
int main(void)
{
reb_init();
reb_subscribe("event1", reb_handler);
reb_subscribe("event1", reb_handler);
reb_subscribe("event2", reb_handler);
reb_info_dump();
}
- ж•Ҳжһңпјҡ
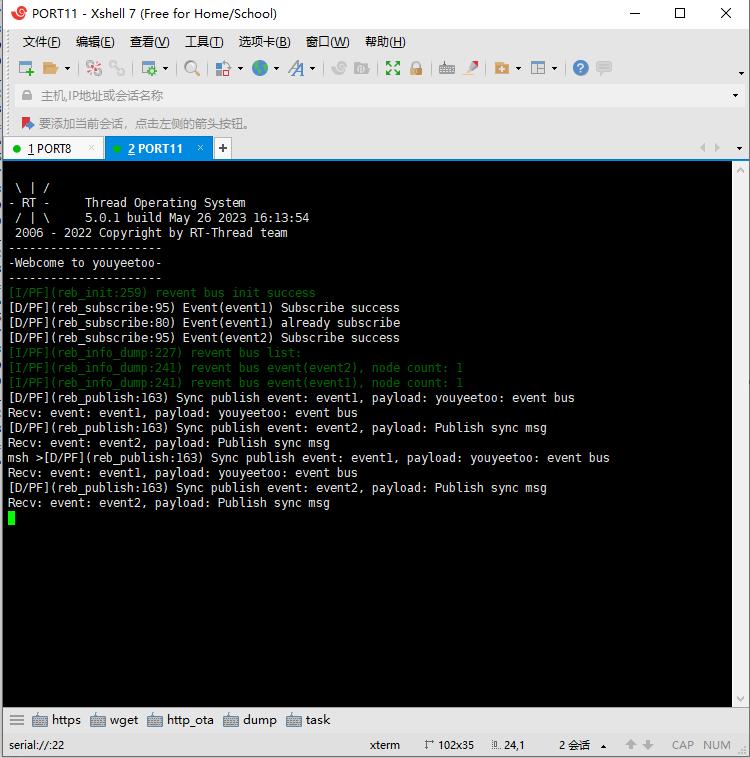
- жіЁж„ҸпјҡеҸ‘еёғеҗҢжӯҘдәӢ件пјҢе®ғжҳҜжҢүз…§йЎәеәҸеҸ‘еёғзҡ„пјҢеҸӘжңү第дёҖдёӘдәӢ件еӨ„зҗҶе®ҢпјҢжүҚдјҡеӨ„зҗҶ第дәҢдёӘдәӢ件гҖӮ
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#include "revent_bus.h"
void reb_handler(const char *event, void *payload, uint16_t lenght)
{
rt_kprintf("Recv: event: %s, payload: %.*s\r\n", event, lenght, payload);
}
int main(void)
{
rt_kprintf("----------------------\r\n");
rt_kprintf("-Webcome to youyeetoo-\r\n");
rt_kprintf("----------------------\r\n");
reb_init();
reb_subscribe("event1", reb_handler);
reb_subscribe("event1", reb_handler);
reb_subscribe("event2", reb_handler);
reb_info_dump();
while (1)
{
reb_publish("event1", "youyeetoo: event bus", rt_strlen("youyeetoo: event bus"));
reb_publish("event2", "Publish sync msg", rt_strlen("Publish sync msg"));
rt_thread_delay(1000);
}
}
- ж•Ҳжһңпјҡ
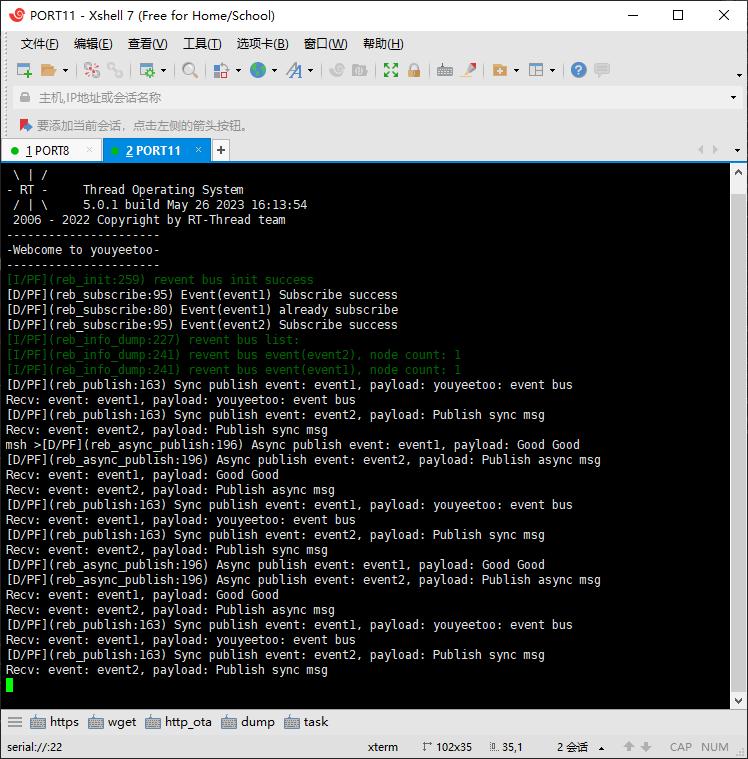
- жіЁж„ҸпјҡеҸ‘еёғејӮжӯҘдәӢ件пјҢеҸ‘еёғзҡ„дәӢ件дёҚдёҖе®ҡз«Ӣ马жү§иЎҢпјҢд»–дјҡзӯүеҫ…зәҝзЁӢжұ зҡ„д»»еҠЎз©әй—Іж—¶пјҢжүҚдјҡжү§иЎҢгҖӮд№ҹе°ұжҳҜжү§иЎҢж—¶й—ҙдёҚзЎ®е®ҡгҖӮ
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
#include "revent_bus.h"
void reb_handler(const char *event, void *payload, uint16_t lenght)
{
rt_kprintf("Recv: event: %s, payload: %.*s\r\n", event, lenght, payload);
}
int main(void)
{
rt_kprintf("----------------------\r\n");
rt_kprintf("-Webcome to youyeetoo-\r\n");
rt_kprintf("----------------------\r\n");
reb_init();
reb_subscribe("event1", reb_handler);
reb_subscribe("event1", reb_handler);
reb_subscribe("event2", reb_handler);
reb_info_dump();
while (1)
{
reb_publish("event1", "youyeetoo: event bus", rt_strlen("youyeetoo: event bus"));
reb_publish("event2", "Publish sync msg", rt_strlen("Publish sync msg"));
rt_thread_delay(100);
reb_async_publish("event1", REB_PRIORITY_ORDINARY, "Good Good", rt_strlen("Good Good"));
reb_async_publish("event2", REB_PRIORITY_ORDINARY, "Publish async msg", rt_strlen("Publish async msg"));
rt_thread_delay(100);
}
}
- ж•Ҳжһңпјҡ
REventBusзҡ„дјҳзјәзӮ№
дјҳзӮ№пјҡ
- з®ҖеҢ–组件дёҺ组件пјҢдёҡеҠЎдёҺдёҡеҠЎпјҢ组件дёҺдёҡеҠЎд№Ӣй—ҙзҡ„йҖҡдҝЎж–№ејҸгҖӮ
- еҜ№йҖҡдҝЎеҸҢж–№еҒҡеҲ°е®Ңе…Ёи§ЈиҖҰгҖӮ
- дҪҝз”ЁRThread poolзҒөжҙ»еҲҮжҚўе·ҘдҪңзәҝзЁӢпјҢдёҖе®ҡзЁӢеәҰжҸҗдҫӣдәҶдәӢ件еӨ„зҗҶж•ҲзҺҮ
- ж”ҜжҢҒеҗҢжӯҘдәӢ件еҸ‘еёғпјҢе’ҢејӮжӯҘдәӢ件еҸ‘еёғгҖӮ
- иө„жәҗеҚ з”ЁжһҒе°ҸгҖӮ
зјәзӮ№пјҡ
- еҪ“дёҡеҠЎеӨҡзҡ„ж—¶еҖҷпјҢйңҖиҰҒе®ҡд№үеҫҲеӨҡдәӢ件зұ»еһӢгҖӮ
- и®ўйҳ…дәӢ件зҡ„ж—¶еҖҷпјҢйңҖиҰҒйҒҚеҺҶдәӢ件еҲ—иЎЁжҳҜеҗҰе·Із»ҸеӯҳеңЁдәӢ件пјӣеҸ‘еёғзҡ„ж—¶еҖҷпјҢд№ҹйңҖиҰҒйҒҚеҺҶдәӢ件еҲ—иЎЁжҳҜеҗҰе·Із»ҸеӯҳеңЁдәӢ件пјҢжҖ§иғҪдёҚй«ҳгҖӮ