-- The Start --
前言:
根据文章:中的内容,我们了解逆Park变换的过程和作用,以及电流闭环各个阶段的电压和电流信号特征。
即,通过以上两篇文章中的内容,我们已经可以将电机转动起来。但是,还存在一个问题就是:在设置Id和Iq固定的情况下,不同负载,电机转速就会波动。即,还需要增加速度闭环控制。于是,双闭环诞生了。本文就此做梳理。
1. 双闭环的位置我们知道Iq可控制电机转速,那么毫无疑问,速度闭环一定是在控制设置Iq。双闭环位置请见下图1。
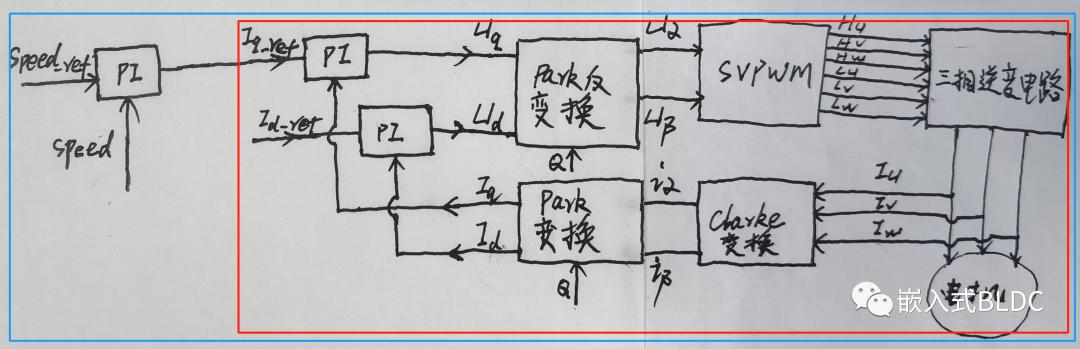 图1
图1如图1,在Iq PID前串接一个速度PID,便形成了双闭环(速度环和电流环)。速度PID的输入是设定转速Speed_ref和实际转速Speed,速度PID输出作为Iq PID的输入。红框为内环,蓝框为外环。
当Speed_ref(设置速度)和Speed(实际速度)存在偏差,那么速度PID就会持续输出调整量Iq_ref。
当Iq_ref(设置Iq)和Iq(实际Iq)存在偏差,那么Iq PID就会持续输出调整量Uq。
当Id_ref(设置Id)和Id(实际Iq)存在偏差,那么Id PID就会持续输出调整量Ud。
对于新手,会很难理解:速度PID的输出怎么就变成设置Iq了?Iq和Id PID的输出怎么就变成Uq和Ud了?提出该问题,其实不奇怪。因为当时我也无法理解这些问题。导致无法理解的根本原因还是对PID理解不够深刻。PID的输出值实际上只是一个调整量,并无实际物理意义。PID输出的调整量的根本目的是为了减小输入设置值和实际值的偏差,最终目的是使偏差为0。既然PID的输出值并无实际物理意义,那么该输出值就可以定义为设置Iq,也可以定义为Uq或者Ud。
(2) 双闭环怎么调试?
在实战过程中,三PI(速度环PID,电流环Iq PID和Id PID)的参数都得调整。这对于只做过BLDC方波驱动的同学来说,会感觉不适。双环的调试步骤,一定是先调内环Iq PID和Id PID的参数,再调外环速度PID的参数。并反复进行。具体调试,没有捷径,只能自己多调多练。如对PID知识遗忘,或者理解不够深刻,那么请再回看以下文章:
(3)双闭环必须同时一起使用?
当然不是。如前文所提,只用电流环也可以转动电机,此时,不需要开启速度闭环,而只需要手动设置Iq和Id即可。如果需要速度闭环控制,那么再启动速度PID即可。即:
- 单电流环,可以
- 速度环+电流环,也可以
- 单速度环,不可以
(4)双闭环功能双闭环实现功能如下:
- 电机恒转速控制(速度闭环)
- 电机加减速(单电流环时,增加或者减小设置Iq;双闭环时,增加或者减小设置速度)
- 恒电流控制(Iq和Id电流闭环)
- 正反转控制(Iq正和负)
- 励磁和弱磁控制(Id正和负)
(5)双闭环的难点
- 调整各PID参数。这是做BLDC和PMSM驱动的必备能力之一。
- 理解各PID输出值的本质含义。
小结:(1)如果不会调试PID参数,那么就一定学不会双闭环。(2)做PMSM驱动,双闭环是绕不开的。-- The End --往期文章:
欢迎点分享、收藏、点赞、在看!谢谢!