-- The Start --
前言:
对于新手,一定会问:我们通过Clarke和Park变换得到Id和Iq,拿Id和Iq来干什么?换句话说,Id和Iq有啥用?本文就此做梳理。
1. Id和Iq的本质含义根据文章:中的内容,可知:(1)Id当然就是三相对称正弦电流转换到dq坐标系下的d轴电流。d轴平行于电机转子磁场方向,称为直轴(电机转子方向)。Iq当然就是三相对称正弦电流转换到dq坐标系下的q轴电流。q轴垂直于电机转子磁场方向,称为交轴(与直轴夹角90°)。(2)θ角是d轴与α轴的夹角,或者说是电机转子与α轴的夹角。θ随着电机转子的转动而变化,θ范围【0°,360°】。即,θ代表了电机转子的位置。(3)Id和Iq公式如下:Id=Iα*cosθ+Iβ*sinθ,Iq=-Iα*sinθ+Iβ*cosθ。
综上,可得Park变换输出的Id和Iq的本质含义:(1)Id是实际采集的三相对称正弦电流转换到电机转子轴线方向的电流。因Id产生的磁场方向和电机转子磁场方向相同(励磁)或者相反(弱磁),即Id可正可负,所以又称Id为励磁(弱磁)电流。(2)Iq是实际采集的三相对称正弦电流转换到电机转子垂直方向的电流。因Iq产生的磁场方向和电机转子磁场方向相互垂直(夹角90°),所以Iq产生磁场和电机转子磁场相互作用可转动电机(存在转动力矩),所以又称Iq为转矩电流。同样,Iq也可正可负,如正Iq正向转动电机,那么负Iq便反向转动电机。(3)θ是电机转子与α轴的夹角,代表了电机转子实际所处的位置。
2. Id和Iq的作用那么我们得到Id和Iq有啥用?这个问题,又得回到文章中,在该文章中有提:“采集三相对称正弦电流有啥用?当然是为了闭环控制。”。得到Id和Iq的最终目的,当然也是为了实现闭环控制。
Park变换输出的Id和Iq,源于实际采集的三相对称正弦电流,因此,可称此Id和Iq为实际Id和Iq。要实现闭环控制,那么肯定要有设置值,即需要定义设置Id和Iq,可用Id_ref和Iq_ref分别表示设置Id和Iq。那么,我们怎么利用实际Id和Iq与设置Id_ref和Iq_ref实现闭环控制呢?当然就是PID(和BLDC驱动一样,PMSM驱动也只用PI)。请看下图1。
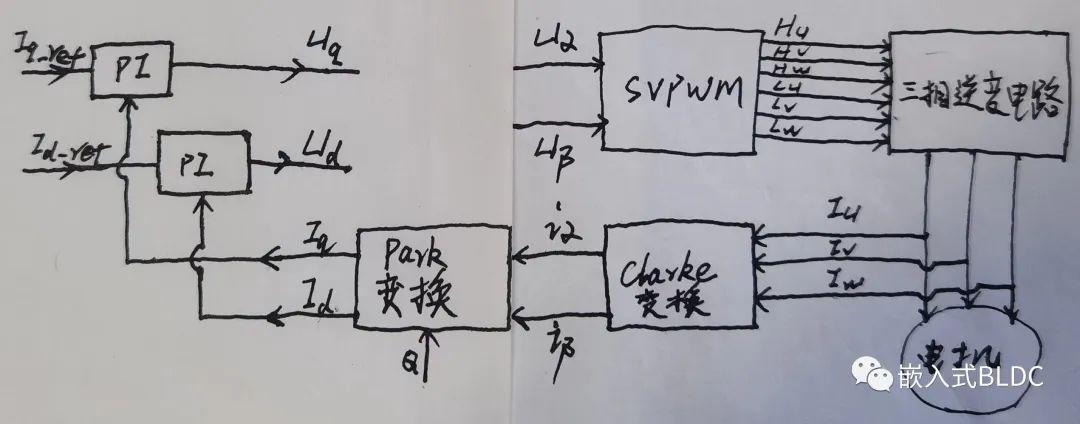 图1
图1如图1所示,Park变换输出的Id和Iq与设置Id_ref和Iq_ref分别作为d轴PI模块和q轴PI模块的输入,两个PI模块输出值分别为Uq和Ud。Uq和Ud与Uα和Uβ之间还差一处空白内容,整个系统就可以构成闭环系统。当然,我想很多同学都早已知道此处空白为逆Park转换。考虑到本号分享PMSM驱动基础篇的编写思路,暂对此部分留白(这不是故弄玄虚,而是循序渐进分享,有利于新手理解与掌握)。
PI模块的特点是有差就调,即只要Id_ref(设置Id)和实际Id大小不一致,或者Iq_ref(设置Iq)和实际Iq大小不一致,那么各自的PI模块就会输出调整值,直到Id_ref和Id 或者Iq_ref和Iq的大小一致为止。换句话说,PI模块的输出值Ud的作用是为了让Id_ref和Id大小一致;Uq的作用是为了让Iq_ref和Iq大小一致。如对PID知识遗忘,或者理解不够深刻,那么请再回看以下文章:
那么Id和Iq到底有啥用?请看下图2。
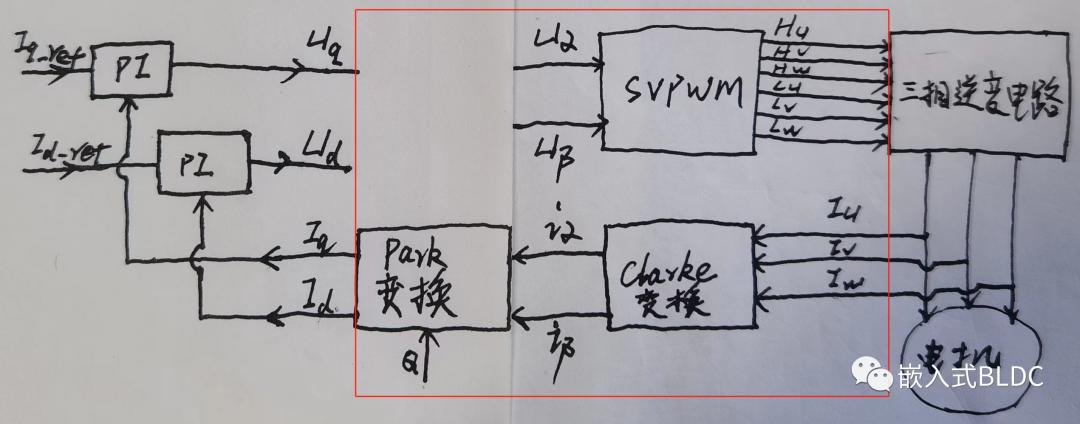 图2
图2如图2所示,如果将红框中的内容视而不见,即将红框内容视为黑盒,那么,图2所示系统的意思是:(1)设置电流Id_ref和实际电流Id_ref通过PID输出Ud。Ud再通过逆变电路驱动电机,得到实际电流Id。(2)设置电流Iq_ref和实际电流Iq_ref通过PID输出Uq。Uq再通过逆变电路驱动电机,得到实际电流Iq。可见,Id_ref和Id实现了闭环控制;Iq_ref和Iq也实现了闭环控制。即,图2实现了电流闭环控制。需要特别指出的是:Id_ref、Id、Iq_ref、Iq都是直流电流信号。
小结:(1)做PMSM驱动,归根结底就是控制Id和Iq。因此,理解Id和Iq的本质含义很重要。(2)做PMSM驱动,通过控制Id和Iq就可以实现电流闭环控制。-- The End --往期文章:
欢迎点分享、收藏、点赞、在看!谢谢!