-- The Start --
前言:题目是《Park变换有啥用?》
中的内容,我们掌握了Clarke变换在PMSM驱动中位置、过程和作用。Clarke变换虽然将三相对称正弦电流从三相静态坐标系转换到两相静态坐标系,但是,即使在两相静态坐标系中,电流依然和时间和速度有关。即,时间不同,电流不同;速度不同,对应的电流也会不同。
那么,有没有一种方法可以将两相静态坐标系的电流转换成为与时间无关的电流呢?即,转换后的电流,无论什么时间,电流大小都不变。于是,Park变化出现了。本文将对Park变换作梳理。
1. Park变换的位置在PMSM驱动系统框图中,Park变换所处位置,请看下图1。
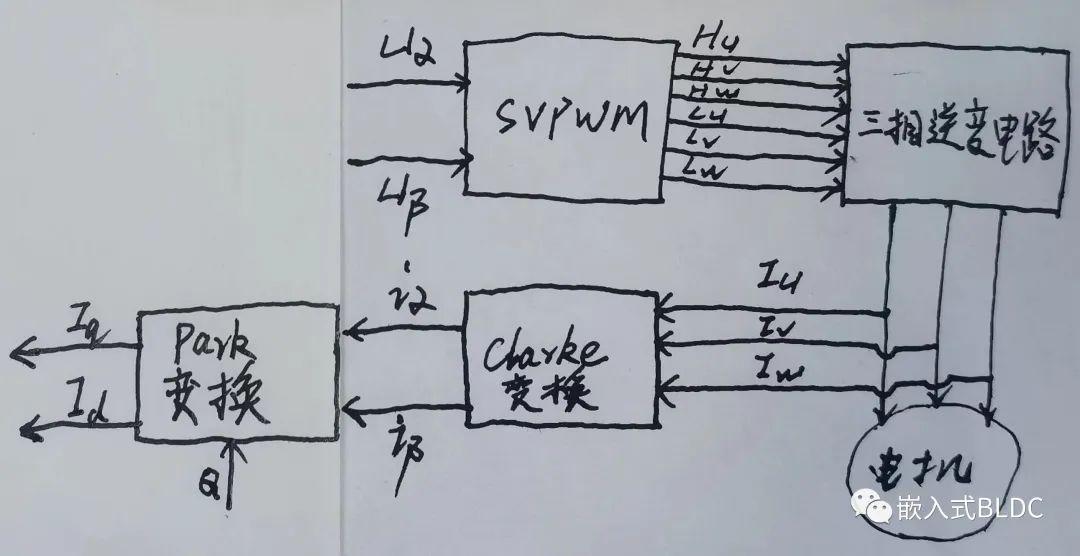 图1
图1如图1所示,Park变换的位置紧接着Clarke变换后。Park变换的输入是:Iα、Iβ和θ;输出是Iq和Id。Iq、Id和θ定义,请见下文。
2. Park变换的过程Park变换的过程也是纯数学运算,也很好理解。请看下图2。
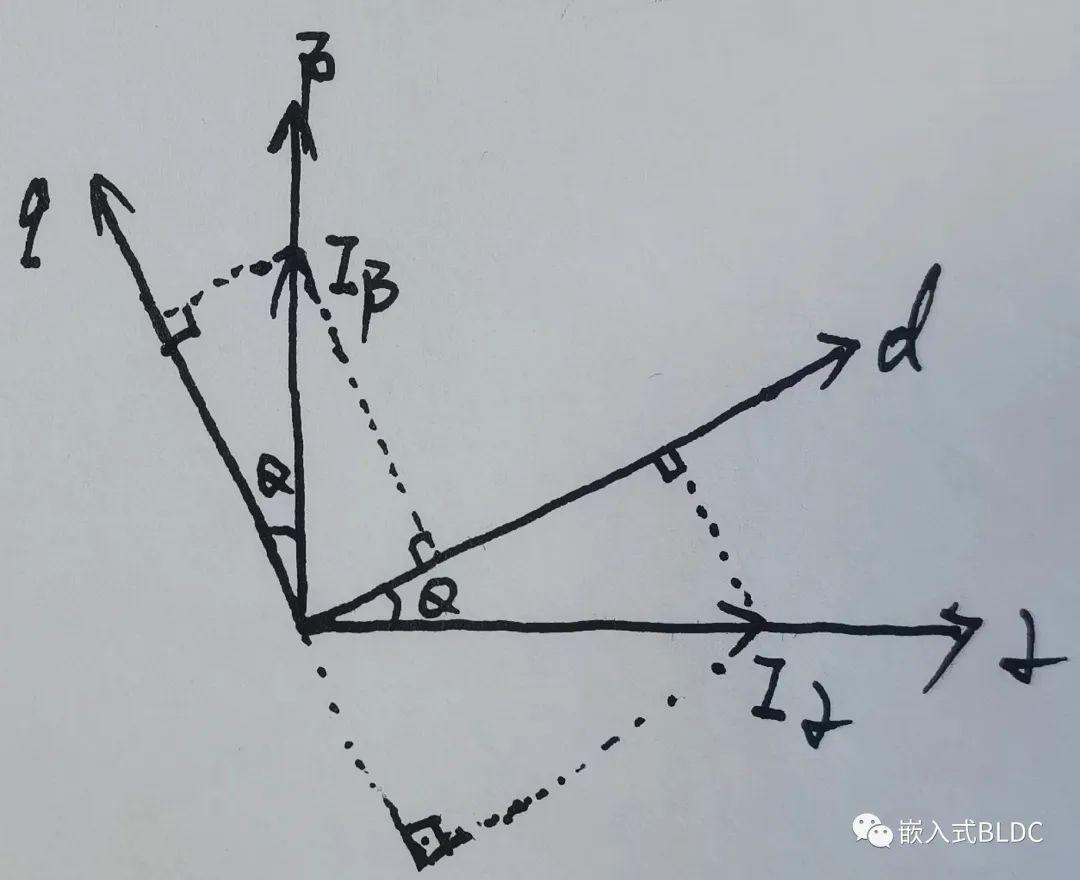 图2如图2所示:(1)有1个两相静态坐标系:αβ坐标系。(2)还有1个动态旋转坐标系:dq坐标系,定义为定子磁场旋转坐标系。d轴平行于电机转子磁场方向,称为直轴。q轴垂直于电机转子磁场方向,称为交轴。(3)还有1个θ角:θ角是d轴与α轴的夹角,或者说是两个坐标系的夹角。
图2如图2所示:(1)有1个两相静态坐标系:αβ坐标系。(2)还有1个动态旋转坐标系:dq坐标系,定义为定子磁场旋转坐标系。d轴平行于电机转子磁场方向,称为直轴。q轴垂直于电机转子磁场方向,称为交轴。(3)还有1个θ角:θ角是d轴与α轴的夹角,或者说是两个坐标系的夹角。对于新手,会很难理解动态旋转是什么概率。梳理如下:(1)为什么是动态旋转?
如果dq坐标系绕平面转动,那么dq坐标才能称为动态旋转坐标系。如果dq坐标系绕平面转动,那么也就意味着θ从0°到360°往复变换。注意:αβ坐标系永远静止不动。(2)如果dq坐标系绕平面转动,那么任意时刻,只要知道θ角,我们就可以将αβ坐标系上的电流分量分解(投影)到dq坐标系(这就是Park变换)。那么,在dq坐标系中的电流分量就只和θ相关,而和时间没有了关系。
根据图2,具体Park变换如下:Id=Iα*cosθ+Iβ*sinθIq=-Iα*sinθ+Iβ*cosθ
3. Clarke变换和Park变换后的电流波形Clarke变换和Park变换前后的电流波形,请见下图3。
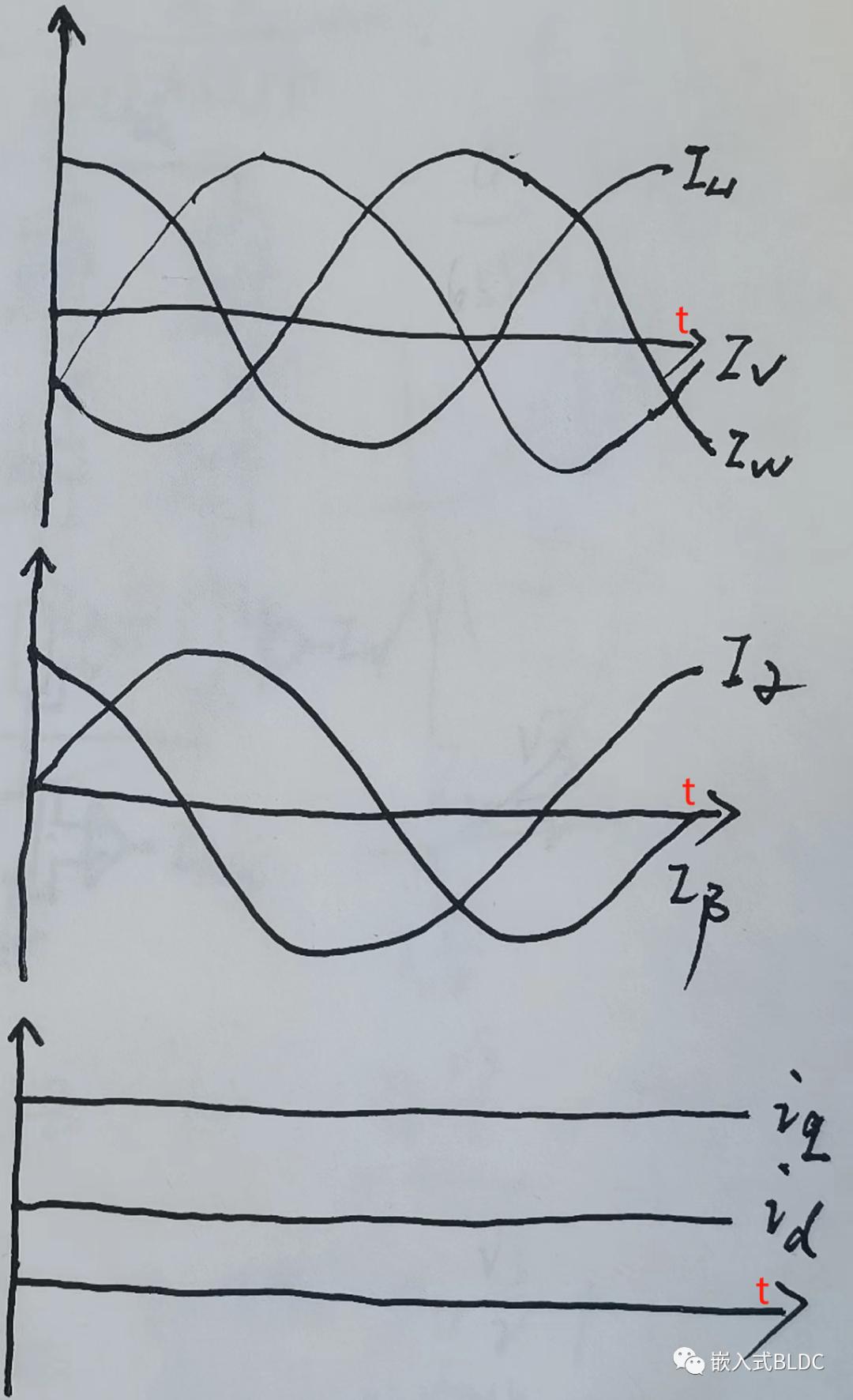
图3
如图3所示,Clarke变换前后的波形分别是:三相对称正弦电流和两相相差90°的正弦波;Park变换前后的波形分别是:两相相差90°的正弦波和两路直流电压Iq和Id。
小结:(1)Park变换将两相静止坐标系转换为两相旋转坐标系。(2)经过Park变换,在PMSM驱动系统中,Iα_Iβ被分解到了dq坐标系下,为后续通过Id和Iq闭环控制电机转速和转矩奠定了基础。(3)Park变换的过程很简单,但是关键是要理解旋转坐标系的概念。-- The End --往期文章:
欢迎点分享、收藏、点赞、在看!谢谢!