-- The Start --
前言:
毫无疑问,做BLDC驱动肯定绕不开配置和控制PWM。无论是使用PWM模块产生PWM,还是使用Timer模块产生PWM,原理都很简单。但是,在做BLDC驱动时,一些配置和控制PWM的细节还得注意。本文就来梳理一下。
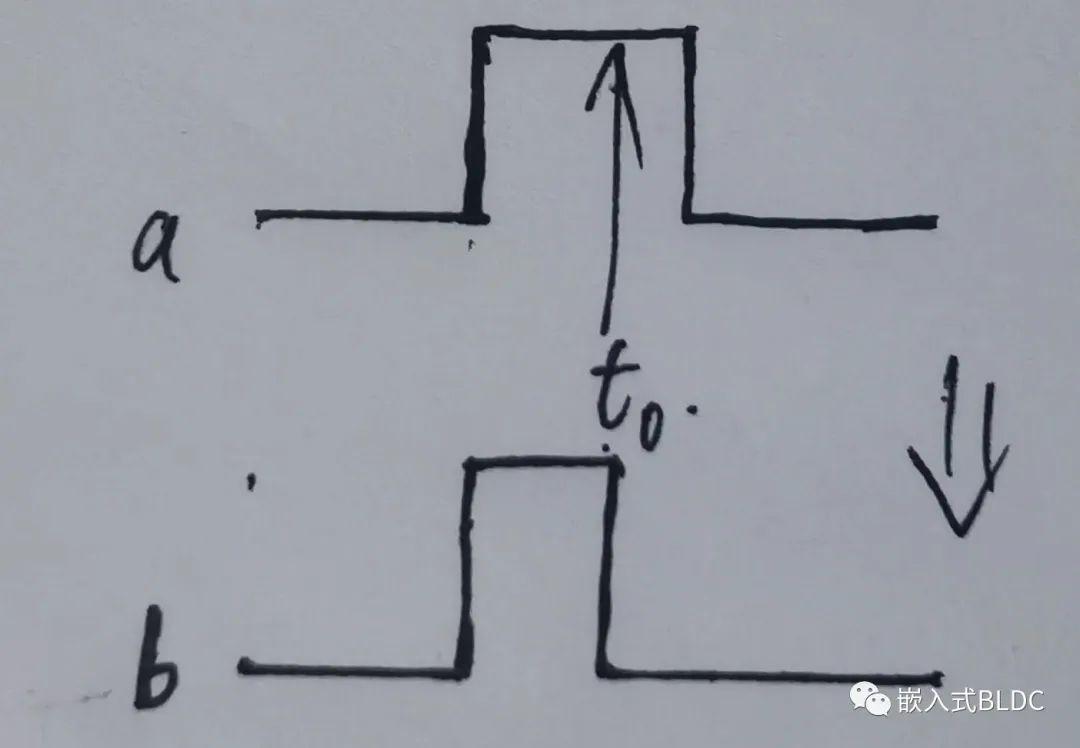
如下图1所示:在t0时刻,需要换相,PWM_a立刻关闭输出变为PWM_b。很明显,这样才能提高换相效率。
2. PWM翻转模式下面以计数器Counter先从0上升到Load,再从Load下降到0,举例说明。请看下图2。

- 图2中,PWM翻转模式a:当Counter大于等于比较器值CMP时,PWM翻转为高电平,否则翻转为低电平。
- 图2中,PWM翻转模式b:当Counter小于等于比较器值CMP时,PWM翻转为高电平,否则翻转为低电平。
你会选择PWM翻转模式a还是b?有同学会说,模式a和b都可以产生PWM,没有区别。
两种模式是否有区别,举例说明如下:假设换相从AC(A上管和C下管导通)切换到BC(B上管和C下管导通),整个换相过程,C下管一直导通,切换仅是:关闭A上管,开启B上管。
根据第1节内容,可知A上管可立刻关闭,那么问题来了,B上管怎么才能立刻开启?
- 如果使用翻转模式a,Counter从0到CMP这段时间,PWM不会输出高电平。即,B上管需要等到Counter大于CMP后才能开启。
- 如果使用翻转模式b,Counter从0时刻开始,PWM就已输出高电平。即,B上管在Counter的0时刻就已开启。
由此可见,翻转模式b的换相效率更高。另外,翻转模式b产生的PWM占空比和CMP成正比例,翻转模式a产生的PWM占空比和CMP成反比例。
如果你在用翻转模式a,那么请赶紧改。
3. PWM最小占空比
如果使用ADC法实现无感BLDC驱动,那么还得注意PWM最小占空比。
根据文中内容,我们知道ADC的采集时间,我们选择在PWM常开的时候,ADC触发的时刻通常选择在PWM高电平的中心位置。如下图3所示。
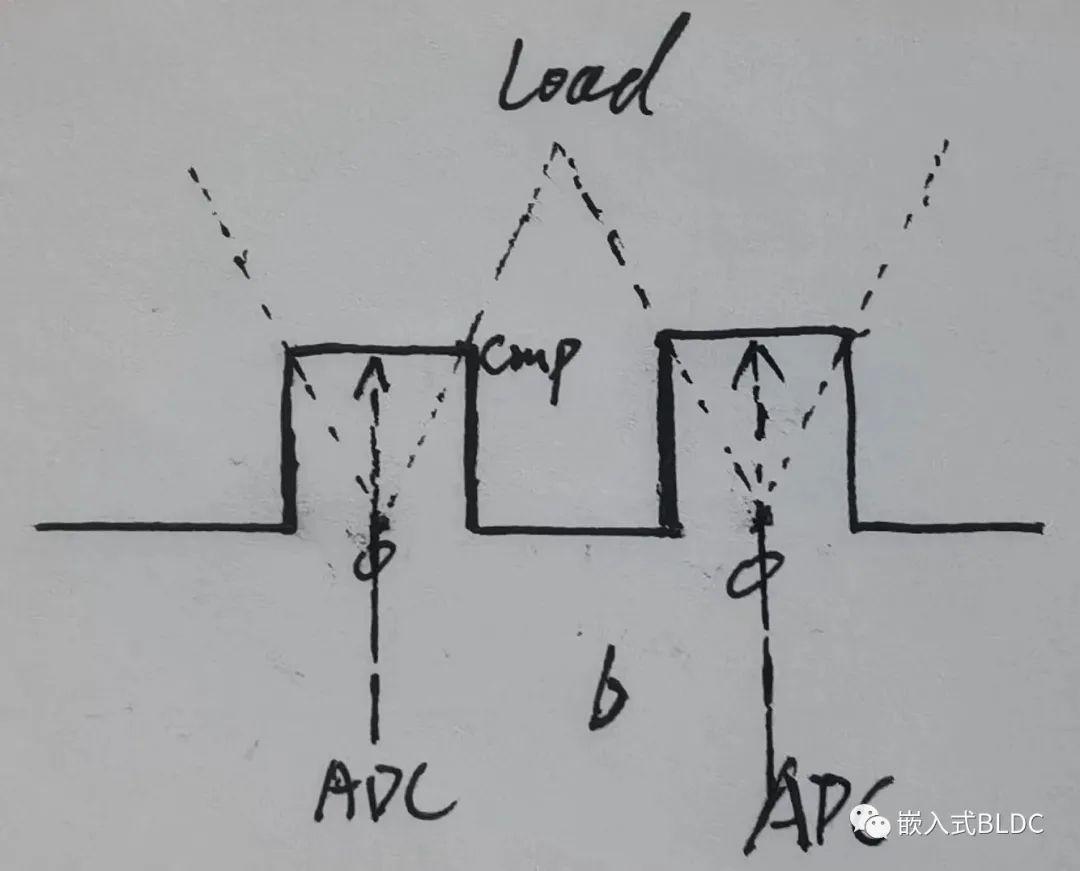
如果ADC采集时间为Tadc,那么周期为Tpwm的PWM最小占空比Duty_min以及对应的CMP公式分别为:Duty_min = (2*Tadc / Tpwm);Duty_min_CMP = (2*Tadc / Tpwm) * Load;
小结:(1)配置和控制PWM都是为了提高换相效率,细微差别对换相效率影响巨大。(2)ADC法做无感BLDC驱动,一定注意最小占空比的设置,否则会出现误判。-- The End --往期文章:
欢迎点分享、收藏、点赞、在看!谢谢!