дёҠзҜҮдёӯиҜҙеҲ°пјҢLinux kernelдёӯеӨ§йғЁеҲҶи®ҫеӨҮеҸҜд»ҘеҪ’з»“дёәе№іеҸ°и®ҫеӨҮпјҢеӣ жӯӨеӨ§йғЁеҲҶзҡ„й©ұеҠЁжҳҜе№іеҸ°й©ұеҠЁгҖӮ
I2CжҺ§еҲ¶еҷЁжҢӮиҪҪеңЁplatform BusдёҠпјҢеӣ жӯӨжҲ‘们еңЁlinux kernelдёӯеёёиҜҙзҡ„I2C driverпјҢйғҪжҳҜжҢҮI2C controller driverпјҢйғҪжҳҜд»Ҙplatform driverзҡ„еҪўејҸеӯҳеңЁпјҢеҪ“然пјҢеҜ№еә”зҡ„жҺ§еҲ¶еҷЁжҳҜplatform deviceгҖӮ
е°ҸйұјеӯҰзј–зЁӢпјҢе…¬дј—еҸ·пјҡеөҢе…ҘејҸABCдёҺжӯӨеҗҢж—¶пјҢkernelжҠҪиұЎеҮәI2C busпјҲ/sys/bus/i2cпјүпјҢз”ЁдәҺжҢӮиҪҪе’ҢI2C controllerйҖҡиҝҮI2CжҖ»зәҝиҝһжҺҘзҡ„еҗ„дёӘI2C slave deviceгҖӮ
жң¬зҜҮеӯҰд№ i2cй©ұеҠЁжһ¶жһ„гҖӮ并зҗҶи§Је’Ңеӣһзӯ”еҰӮдёӢй—®йўҳ
I2C Controller DriverжҳҜеҰӮдҪ•еҹәдәҺplatform driverеұ•ејҖзҡ„
дёәд»Җд№ҲйңҖиҰҒI2C AdapterпјҢ I2C AdapterжҸҗдҫӣдәҶд»Җд№Ҳпјҹ
I2C Slave DriverжҳҜеҰӮдҪ•е®һзҺ°зҡ„
I2C 硬件жҖ»зәҝжӢ“жү‘
и®ҫжғідёҖдёӘжҷәиғҪ家еұ…дёӯжҺ§еұҸеёҰжңүLCDеӨ§еұҸе’Ңз”өе®№и§Ұж‘ёеұҸгҖӮе…¶з”өе®№и§Ұж‘ёеұҸпјҢеҠ йҖҹеәҰдј ж„ҹеҷЁпјҲжЁӘз«–еұҸпјүзӯүжңүеҸҜиғҪеҚіжҳҜi2CжҺҘеҸЈгҖӮ
дёҠж–ҮдёӯпјҢжҲ‘们е°ҶSOCеӨ–и®ҫжҠҪиұЎдёәplatform busдёҠзҡ„platform и®ҫеӨҮгҖӮеӨ„зҗҶеҷЁi2c controllerдҪңдёәmasterпјҢi2cжҖ»зәҝдёҠзҡ„и§Ұж‘ёеұҸе’Ңдј ж„ҹеҷЁдёәд»Һи®ҫеӨҮпјҲi2C slavesпјүгҖӮеҲҷиҝӣдёҖжӯҘжҠҪиұЎдёәдёӢеӣҫ
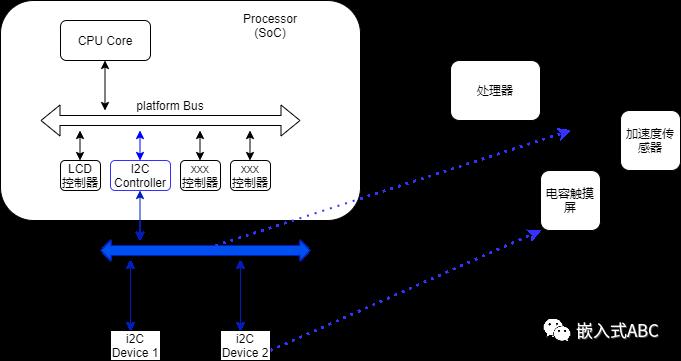
NoteпјҡlinuxдёҚж”ҜжҢҒI2CеӨ–и®ҫдҪңдёәi2c slaveи®ҫеӨҮгҖӮдҪҶжҳҜз»қеӨ§ж•°зҡ„и·‘linuxзі»з»ҹзҡ„еӨ„зҗҶеҷЁеә”иҜҘйғҪжҳҜдҪңдёәдё»и®ҫеӨҮзҡ„гҖӮ
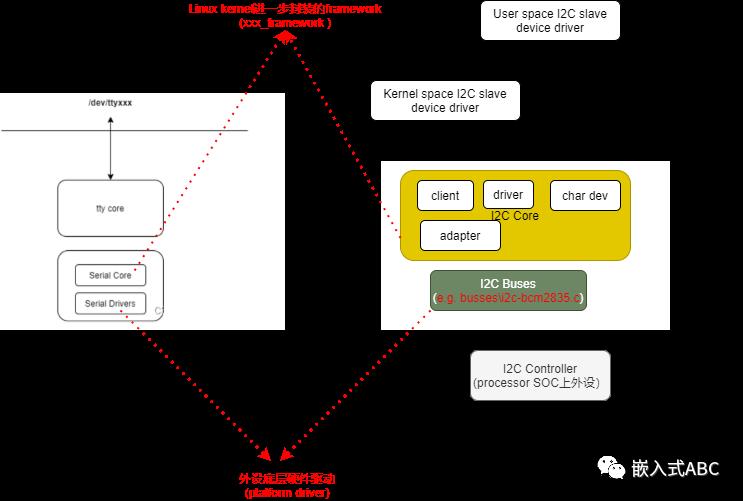
linux kernel I2C framework
дёҠеӣҫзҡ„硬件жӢ“жү‘еңЁi2c frameworkдёӯеҸҲжҳҜеҰӮдҪ•жҠҪиұЎзҡ„е‘ўпјҹ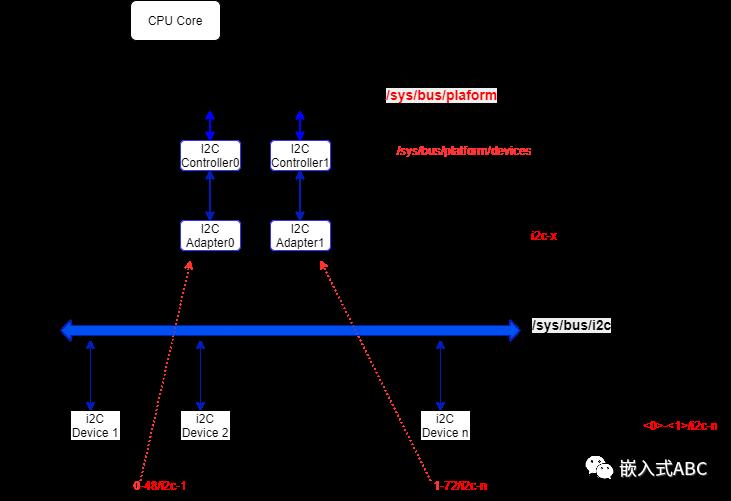
е…¶дёӯ
/sys/bus/i2c/devices/<0>-<1>/where <0> is the bus the chip is connected to (e. g. i2c-0)and <1> the chip addressдҫӢеҰӮпјҡpi@raspberrypi:/sys/bus/platform/devices/3f804000.i2c $ ls
driver driver_override i2c-1 modalias of_node power subsystem ueventi2c Framework жЎҶжһ¶еӣҫ
д»Јз ҒдҪҚдәҺи·Ҝеҫ„drivers\i2c\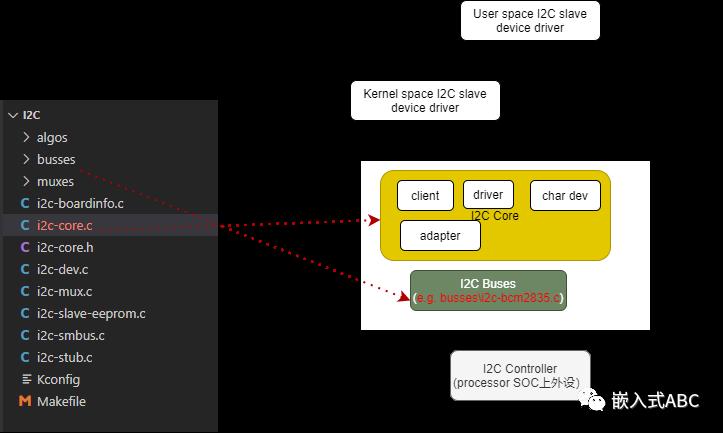
I2C coreдҪҝз”ЁI2C adapterе’ҢI2C algorithmдёӨдёӘеӯҗжЁЎеқ—жҠҪиұЎI2C controllerзҡ„еҠҹиғҪпјҢдҪҝз”ЁI2C clientе’ҢI2C driverжҠҪиұЎI2C slave deviceзҡ„еҠҹиғҪпјҲеҜ№еә”и®ҫеӨҮжЁЎеһӢдёӯзҡ„deviceе’Ңdevice driverпјүгҖӮеҸҰеӨ–пјҢеҹәдәҺI2CеҚҸи®®пјҢйҖҡиҝҮsmbusжЁЎеқ—е®һзҺ°SMBusпјҲSystem Management BusпјҢзі»з»ҹз®ЎзҗҶжҖ»зәҝпјүзҡ„еҠҹиғҪгҖӮ
I2C bussesжҳҜеҗ„дёӘI2C controller driversзҡ„йӣҶеҗҲпјҢдҪҚдәҺdrivers/i2c/busses/зӣ®еҪ•дёӢпјҢй©ұеҠЁе·ҘзЁӢеёҲеёёиҜҙзҡ„вҖңI2C driverвҖқе°ұжҳҜжҢҮе®ғ们гҖӮжҜ”еҰӮж ‘иҺ“жҙҫзҡ„i2Cй©ұеҠЁпјҡbusses\i2c-bcm2835.c
I2C Controller Driver
дёҠиҠӮдёӯжҸҗеҲ°дәҶпјҢI2C bussesжҳҜеҗ„дёӘI2C controller driversзҡ„йӣҶеҗҲпјҢдҪҚдәҺdrivers/i2c/busses/зӣ®еҪ•дёӢпјҢй©ұеҠЁе·ҘзЁӢеёҲеёёиҜҙзҡ„вҖңI2C driverвҖқе°ұжҳҜжҢҮе®ғ们гҖӮжҜ”еҰӮж ‘иҺ“жҙҫзҡ„i2Cй©ұеҠЁпјҡbusses\i2c-bcm2835.cгҖӮжіЁж„ҸиҝҷйҮҢзҡ„driver е’Ңi2C core жЎҶеӣҫйҮҢйқўзҡ„driverзҡ„еҢәеҲ«гҖӮиҝҳд»Ҙbusses\i2c-bcm2835.cеұ•ејҖпјҢеҰӮдёӢеӣҫпјҢиҝҷжҳҜдёҖдёӘplatform_driver.

еҸӮз…§дёҠж–Үдёӯзҡ„platformй©ұеҠЁејҖеҸ‘жЎҶжһ¶пјҢ
жЁЎеқ—зҡ„е…ҘеҸЈе’ҢеҮәеҸЈ
platform driverдёүиҰҒзҙ
struct platform_driverеҸҳйҮҸ
probe/removeеҮҪж•°
з”ЁдәҺе’Ңdevice treeеҢ№й…Қзҡ„match table
е…¶дёӯвҖңжЁЎеқ—зҡ„е…ҘеҸЈе’ҢеҮәеҸЈвҖқпјҢ з”ұе®Ҹ module_platform_driver(bcm2835_i2c_driver);е®ҡд№үгҖӮ
дёүиҰҒзҙ дёӯзҡ„вҖңmatch table"еҮҪж•°
//driverдёӯmatch tablestatic const struct of_device_id bcm2835_i2c_of_match[] = { { .compatible = "brcm,bcm2835-i2c" }, {},};
//dts дёӯ i2c0 controllerиө„жәҗ i2c0: i2c@20205000 { compatible = "brcm,bcm2835-i2c"; reg = <0x7e205000 0x1000>; interrupts = <2 21>; clocks = <&clk_i2c>; #address-cells = <1>; #size-cells = <0>; status = "disabled"; };дёүиҰҒзҙ дёӯзҡ„вҖңprobe"еҮҪж•°
static int bcm2835_i2c_probe(struct platform_device *pdev){ struct bcm2835_i2c_dev *i2c_dev; struct resource *mem, *irq; u32 bus_clk_rate, divider; int ret; struct i2c_adapter *adap;
i2c_dev = devm_kzalloc(&pdev->dev, sizeof(*i2c_dev), GFP_KERNEL); if (!i2c_dev) return -ENOMEM; platform_set_drvdata(pdev, i2c_dev); i2c_dev->dev = &pdev->dev; init_completion(&i2c_dev->completion);
mem = platform_get_resource(pdev, IORESOURCE_MEM, 0); i2c_dev->regs = devm_ioremap_resource(&pdev->dev, mem); if (IS_ERR(i2c_dev->regs)) return PTR_ERR(i2c_dev->regs);
i2c_dev->clk = devm_clk_get(&pdev->dev, NULL); if (IS_ERR(i2c_dev->clk)) { dev_err(&pdev->dev, "Could not get clock\n"); return PTR_ERR(i2c_dev->clk); }
ret = of_property_read_u32(pdev->dev.of_node, "clock-frequency", &bus_clk_rate); if (ret < 0) { dev_warn(&pdev->dev, "Could not read clock-frequency property\n"); bus_clk_rate = 100000; }
divider = DIV_ROUND_UP(clk_get_rate(i2c_dev->clk), bus_clk_rate); /* * Per the datasheet, the register is always interpreted as an even * number, by rounding down. In other words, the LSB is ignored. So, * if the LSB is set, increment the divider to avoid any issue. */ if (divider & 1) divider++; bcm2835_i2c_writel(i2c_dev, BCM2835_I2C_DIV, divider);
irq = platform_get_resource(pdev, IORESOURCE_IRQ, 0); if (!irq) { dev_err(&pdev->dev, "No IRQ resource\n"); return -ENODEV; } i2c_dev->irq = irq->start;
ret = request_irq(i2c_dev->irq, bcm2835_i2c_isr, IRQF_SHARED, dev_name(&pdev->dev), i2c_dev); if (ret) { dev_err(&pdev->dev, "Could not request IRQ\n"); return -ENODEV; }
adap = &i2c_dev->adapter; i2c_set_adapdata(adap, i2c_dev); adap->owner = THIS_MODULE; adap->class = I2C_CLASS_DEPRECATED; strlcpy(adap->name, "bcm2835 I2C adapter", sizeof(adap->name)); adap->algo = &bcm2835_i2c_algo; adap->dev.parent = &pdev->dev; adap->dev.of_node = pdev->dev.of_node;
bcm2835_i2c_writel(i2c_dev, BCM2835_I2C_C, 0);
ret = i2c_add_adapter(adap); if (ret) free_irq(i2c_dev->irq, i2c_dev);
return ret;}жҲ‘们еҸ‘зҺ°е…¶е®һе’ҢдёҠж–Үдёӯзҡ„serial driverе№ІдәҶзұ»дјјзҡ„дәӢжғ…
еӣһеҝҶдёҖдёӢдёҠж–Үдёӯзҡ„serial driver:
е®ҡд№ү并注еҶҢuart driver
жіЁеҶҢuart port
е®ҡд№ү并е®һзҺ°uart ops
иҝҷйҮҢзҡ„i2C driverпјҲжіЁж„ҸжҳҜеӣҫдёӯзҡ„i2c busesпјүеә”иҜҘд№ҹжҳҜе®ҢжҲҗзҡ„зұ»дјјзҡ„е®һзҺ°пјҢеҸӘжҳҜдёҚеҗҢдәҺserial driverпјҢиҝҷйҮҢеҸҲе°ҒиЈ…дәҶдёӘ"adapter". еңЁдёҠйқўзҡ„probeеҮҪж•°дёӯпјҢжңҖз»ҲжҳҜж·»еҠ дәҶдёҖдёӘ"adapter"гҖӮ
adap = &i2c_dev->adapter; i2c_set_adapdata(adap, i2c_dev); adap->owner = THIS_MODULE; adap->class = I2C_CLASS_DEPRECATED; strlcpy(adap->name, "bcm2835 I2C adapter", sizeof(adap->name)); adap->algo = &bcm2835_i2c_algo; adap->dev.parent = &pdev->dev; adap->dev.of_node = pdev->dev.of_node; bcm2835_i2c_writel(i2c_dev, BCM2835_I2C_C, 0); ret = i2c_add_adapter(adap);иҝҷдёӘadapterжңҖз»Ҳе®һзҺ°дәҶеә•еұӮзҡ„й©ұеҠЁ
static const struct i2c_algorithm bcm2835_i2c_algo = { .master_xfer = bcm2835_i2c_xfer, .functionality = bcm2835_i2c_func,};
//probeеҮҪж•°дёӯпјҡ//жіЁеҶҢ收еҸ‘дёӯж–ӯ ret = request_irq(i2c_dev->irq, bcm2835_i2c_isr, IRQF_SHARED, dev_name(&pdev->dev), i2c_dev);//з»ҷadapterзҡ„algoиөӢеҖј adap->algo = &bcm2835_i2c_algo;i2c core
дёҠиҠӮдёӯжҸҗеҲ°пјҢI2C coreдҪҝз”ЁI2C adapterе’ҢI2C algorithmдёӨдёӘеӯҗжЁЎеқ—жҠҪиұЎI2C controllerзҡ„еҠҹиғҪпјҢдҪҝз”ЁI2C clientе’ҢI2C driverжҠҪиұЎI2C slave deviceзҡ„еҠҹиғҪпјҲеҜ№еә”и®ҫеӨҮжЁЎеһӢдёӯзҡ„deviceе’Ңdevice driverпјүгҖӮиҝҷйҮҢзҡ„driverжҳҜi2cи®ҫеӨҮdriverгҖӮ/* * i2c_adapter is the structure used to identify a physical i2c bus along * with the access algorithms necessary to access it. */struct i2c_adapter { struct module *owner; unsigned int class; /* classes to allow probing for */ const struct i2c_algorithm *algo; /* the algorithm to access the bus */ void *algo_data;
/* data fields that are valid for all devices */ struct rt_mutex bus_lock;
int timeout; /* in jiffies */ int retries; struct device dev; /* the adapter device */
int nr; char name[48]; struct completion dev_released;
struct mutex userspace_clients_lock; struct list_head userspace_clients;
struct i2c_bus_recovery_info *bus_recovery_info; const struct i2c_adapter_quirks *quirks;};дёӢж–ҮеҶҚжҺҘзқҖзңӢеҰӮдҪ•еҹәдәҺkernelжҸҗдҫӣзҡ„i2c frameworkпјҢеңЁеҶ…ж ёз©әй—ҙжҲ–иҖ…з”ЁжҲ·з©әй—ҙејҖеҸ‘i2c и®ҫеӨҮй©ұеҠЁпјҲdevice driverпјү