硬件
I2C
MPU6050зҡ„зӣёе…іеҗҚиҜҚ
MPU6050 й…ҚзҪ®
1 WHO_AM_I
2 Power Management 1
3 Configuration
4 SMPRT_DIV
5 Gyroscope Configuration
6 Accelerometer Configuration
иҜ»еҸ–еҺҹе§Ӣж•°жҚ®
7 Temperature Measurement
8 Gyroscope Measurements
9 Accelerometer Measurements
е…¶д»–иҮӘи®Өдёәжңүз”Ёзҡ„еҜ„еӯҳеҷЁ
9 FIFO Enable
10 Interrupt Enable
11 User Control
иҜ»еҸ–з»“жһң
дёӢдёҖжӯҘи®ЎеҲ’
иҜҙжқҘд№ҹжғӯ愧пјҢиҮӘе·ұиҝҳжІЎжңүж №жҚ®иҝҮDataSheedиҝӣиЎҢејҖеҸ‘пјҢдёҖиҲ¬йғҪжҳҜзӣҙжҺҘеңЁзҪ‘дёҠжҗңзҙўд»Јз ҒпјҢ然еҗҺжҢ‘дёҖдёӘиғҪзңӢжҮӮзҡ„д»Јз ҒдҪҝгҖӮжҲ–иҖ…пјҢзӣҙжҺҘдҪҝз”ЁеҺӮ家жҸҗдҫӣзҡ„demoиҝӣиЎҢдёӢдёҖжӯҘеҠЁдҪңгҖӮиҝҷж¬ЎжғіеҲ©з”Ёеёёи§Ғзҡ„MPU6050пјҢйҖҡиҝҮжҹҘзңӢDataSheedиҝӣиЎҢй…ҚзҪ®пјҢе®һзҺ°иҺ·еҸ–жё©еәҰгҖҒйҷҖиһәд»ӘгҖҒеҠ йҖҹеәҰеҖјгҖӮ
硬件
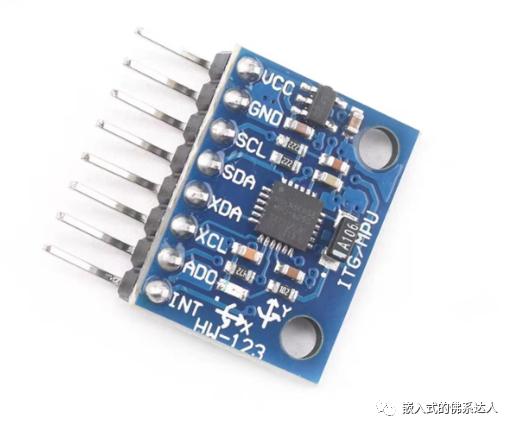
еј•и„ҡиҜҙжҳҺпјҡ
| еј•и„ҡ | иҜҙжҳҺ |
|---|---|
| VCC | з”өжәҗз«ҜпјҢmpu6050иҮӘеёҰзЁіеҺӢиҠҜзүҮпјҢеӣ жӯӨжҺҘеҸ—5Vе’Ң3.3Vдҫӣз”ө |
| GND | з”өжәҗең° |
| SCL | I2Cж—¶й’ҹзәҝ |
| SDA | I2Cж•°жҚ®зәҝ |
| XDA | еӨ–жҺҘи®ҫеӨҮзҡ„ж•°жҚ®зәҝ |
| XCL | еӨ–жҺҘи®ҫеӨҮзҡ„ж—¶й’ҹзәҝ |
| ADO | mpu6050и®ҫеӨҮең°еқҖжҺ§еҲ¶пјҢADO=1пјҢең°еқҖдёә0x69пјҢ ADO=0жҲ–иҖ…жӮ¬з©әпјҢең°еқҖдёә0x68 |
| INT | дёӯж–ӯеј•и„ҡпјҡдёҖж—Ұmpu6050жңүж•°жҚ®иҫ“еҮәж—¶пјҢиҜҘеј•и„ҡжңүзӣёеә”зҡ„з”өе№ідҝЎеҸ·пјҢеҸҜд»Ҙз”ЁдәҺдҝқжҢҒMPUдҝЎеҸ·зҡ„е®һж—¶жҖ§ |
е’ҢESP32зҡ„иҝһжҺҘ
| MPU6050 | ESP32 |
|---|---|
| VCC | 3.3V |
| GND | GND |
| SCL | 2 |
| SDA | 18 |
| XDA | жңӘжҺҘ |
| XCL | жңӘжҺҘ |
| ADO | жӮ¬з©ә |
| INT | жңӘжҺҘ |
I2C
I2Cж•°жҚ®её§
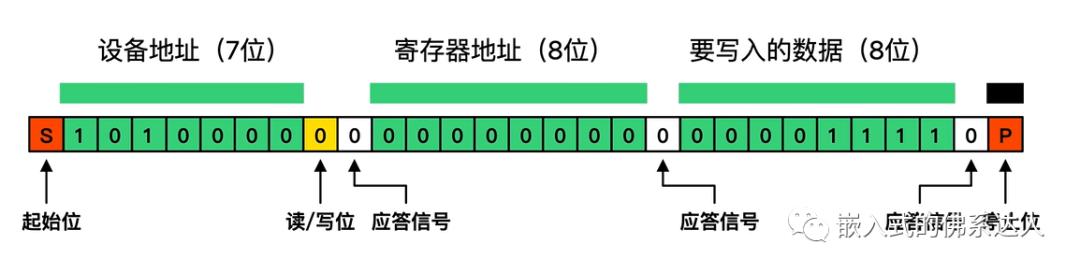
- иө·е§ӢдҪҚпјҡSCLй«ҳз”өе№іпјҢSDAдёӢйҷҚжІҝпјӣ
- и®ҫеӨҮең°еқҖпјҡ7дҪҚпјӣ
- иҜ»еҶҷдҪҚпјҡ0пјҡдё»и®ҫеӨҮеҗ‘д»Һи®ҫеӨҮеҶҷж•°жҚ®пјҢ1пјҡдё»и®ҫеӨҮеҗ‘д»Һи®ҫеӨҮиҜ»ж•°жҚ®пјӣ
- еә”зӯ”дҝЎеҸ·пјҡд»Һи®ҫеӨҮеә”зӯ”пјҢд»Һи®ҫеӨҮжӯЈеёёеә”зӯ”ж—¶пјҢSDAдёәдҪҺз”өе№іпјҢд»Һи®ҫеӨҮеҝҷжҲ–иҖ…е…¶д»–жғ…еҶөпјҢSDAдёәй«ҳз”өе№іпјӣ
- еҜ„еӯҳеҷЁең°еқҖпјҡ8дҪҚпјӣ
- еә”зӯ”дҝЎеҸ·пјҡ
- ж•°жҚ®пјҡеҶҷе…ҘеҜ„еӯҳеҷЁж•°жҚ®пјҲ8дҪҚпјүпјӣ
- еҒңжӯўдҪҚпјҡSCLй«ҳз”өе№іпјҢSDAдёҠеҚҮжІҝпјӣ
ESP-idfжҸҗдҫӣI2Cй©ұеҠЁзЁӢеәҸпјҢеӣ жӯӨI2Cзҡ„й…ҚзҪ®жҜ”иҫғз®ҖеҚ•гҖӮ
жӯҘйӘӨпјҡ
i2c_config_t confi2c_driver_install()#define I2C_MASTER_SCL_IO 8 // ж—¶й’ҹзәҝ
#define I2C_MASTER_SDA_IO 18 // ж•°жҚ®зәҝ
#define I2C_MASTER_NUM 0 // I2C master i2c port number
#define I2C_MASTER_FREQ_HZ 400000 // I2Cйў‘зҺҮ
#define I2C_MASTER_TX_BUF_DISABLE 0 /*!< I2C master doesn't need buffer */
#define I2C_MASTER_RX_BUF_DISABLE 0 /*!< I2C master doesn't need buffer */
esp_err_t i2c_master_init(void)
{
int i2c_master_port = I2C_MASTER_NUM;
i2c_config_t conf = {
.mode = I2C_MODE_MASTER,
.sda_io_num = I2C_MASTER_SDA_IO,
.scl_io_num = I2C_MASTER_SCL_IO,
.sda_pullup_en = GPIO_PULLUP_ENABLE,
.scl_pullup_en = GPIO_PULLUP_ENABLE,
.master.clk_speed = I2C_MASTER_FREQ_HZ,
};
i2c_param_config(i2c_master_port, &conf);
return i2c_driver_install(i2c_master_port, conf.mode, I2C_MASTER_RX_BUF_DISABLE, I2C_MASTER_TX_BUF_DISABLE, 0);
}
MPU6050зҡ„зӣёе…іеҗҚиҜҚ
йҷҖиһәд»ӘпјҡжөӢйҮҸзҡ„жҳҜз»•xyzиҪҙиҪ¬еҠЁзҡ„и§’йҖҹеәҰпјҢеҚ•дҪҚпјҡDegree Per Secondзҡ„зј©еҶҷВ°/S пјӣ
еҠ йҖҹеәҰпјҡжөӢйҮҸзҡ„жҳҜxyzж–№еҗ‘еҸ—еҲ°зҡ„еҠ йҖҹеәҰпјҢйқҷжӯўзҠ¶жҖҒдёӢпјҢдёүдёӘж–№еҗ‘зҡ„еҗҲеҠ йҖҹеәҰдёәйҮҚеҠӣеҠ йҖҹеәҰпјӣ
DMPпјҡDigital Motion ProcessorпјҢзӣҙжҺҘиҫ“еҮәеӣӣе…ғж•°пјҢ并йқһе®Ңе…ЁејҖжәҗпјӣ
еӣӣе…ғж•°пјҡеӣӣе…ғж•°еҸҜд»Ҙж–№дҫҝзҡ„иЎЁзӨә3з»ҙз©әй—ҙзҡ„ж—ӢиҪ¬гҖӮеҹәжң¬еҪўејҸпјҡпјҢдёҖдёӘе®һйғЁе’ҢдёүдёӘиҷҡйғЁпјӣ
欧жӢүи§’пјҡpitchпјҡдҝҜд»°пјҲз»•yиҪҙж—ӢиҪ¬пјүгҖҒrollж»ҡеҠЁпјҲз»•XиҪҙж—ӢиҪ¬пјүпјҡгҖҒyawпјҡеҒҸиҲӘпјҲз»•ZиҪҙж—ӢиҪ¬пјүзҡ„иЎЁзӨәеҪўејҸпјҢж–№дҫҝи§ӮеҜҹе§ҝжҖҒгҖӮдёҚиҝҮеӯҳеңЁжӯ»й”ҒзҺ°иұЎпјӣ
MPU6050 й…ҚзҪ®
MPU6050й…ҚзҪ®дё»иҰҒж №жҚ®DataSheedй…ҚзҪ®зӣёе…іеҜ„еӯҳеҷЁжқҘгҖӮ
й…ҚзҪ®зҡ„ж ёеҝғд»Јз Ғпјҡ
#define MPU_DEVICE_ID_REG 0X75 //еҷЁд»¶IDеҜ„еӯҳеҷЁ
#define MPU_PWR_MGMT1_REG 0X6B //з”өжәҗз®ЎзҗҶеҜ„еӯҳеҷЁ1
#define MPU_CFG_REG 0X1A //й…ҚзҪ®еҜ„еӯҳеҷЁ
#define MPU_SAMPLE_RATE_REG 0X19 //йҮҮж ·йў‘зҺҮеҲҶйў‘еҷЁ
#define MPU_GYRO_CFG_REG 0X1B //йҷҖиһәд»Әй…ҚзҪ®еҜ„еӯҳеҷЁ
#define MPU_ACCEL_CFG_REG 0X1C //еҠ йҖҹеәҰи®Ўй…ҚзҪ®еҜ„еӯҳеҷЁ
/*иҜ»еҸ–и®ҫеӨҮIDпјҢеҲӨж–ӯI2CйҖҡдҝЎжҳҜеҗҰжӯЈеёё*/
ESP_ERROR_CHECK(mpu6050_register_read(MPU_DEVICE_ID_REG, data, 1));
ESP_LOGI(TAG, "WHO_AM_I = %X", data[0]);
/*йҮҚзҪ®и®ҫеӨҮ*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_PWR_MGMT1_REG, 0x80));
vTaskDelay(100 / portTICK_PERIOD_MS);
/*зҰҒз”ЁзқЎзң жЁЎејҸпјҢйҖүжӢ©XиҪҙйҷҖиһәд»Әдёәж—¶й’ҹжәҗ*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_PWR_MGMT1_REG, 0x01));
/*й…ҚзҪ®ж•°еӯ—дҪҺйҖҡж»ӨжіўеҷЁпјҢеёҰе®Ҫдёә5пјҢйҷҖиһәд»Әиҫ“еҮәйў‘зҺҮдёә1kHz*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_CFG_REG, 0x06));
/*й…ҚзҪ®йҮҮж ·йў‘зҺҮ:50Hz*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_SAMPLE_RATE_REG, 19));
/*й…ҚзҪ®йҷҖиһәд»ӘйҮҸзЁӢ:Вұ 2000 В°/s, дёҚиҮӘжЈҖ*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_GYRO_CFG_REG, 0x18));
/*й…ҚзҪ®еҠ йҖҹеәҰи®ЎйҮҸзЁӢ: Вұ 16gпјҢ дёҚиҮӘжЈҖ*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_ACCEL_CFG_REG, 0x18));
1 WHO_AM_I
иҜ»еҸ–mpu6050зҡ„IDпјӣй»ҳи®Өдёә0x68пјҢеҸҜд»Ҙз”ЁжқҘйӘҢиҜҒIICеә•еұӮжҳҜеҗҰй…ҚзҪ®еҘҪгҖӮе…¶жңҖеҗҺдёҖдҪҚз”ұADOеҶіе®ҡгҖӮеҰӮжһңADO=1пјҢеҜ„еӯҳеҷЁзҡ„зҡ„еҖјдёә0x69пјҢеҗҰеҲҷдёә0x68пјӣ
ESP_ERROR_CHECK(mpu6050_register_read(MPU_DEVICE_ID_REG, data, 1));

2 Power Management 1
й…ҚзҪ®з”өжәҗе’Ңж—¶й’ҹжәҗпјҢз”ЁдәҺйҮҚзҪ®и®ҫеӨҮе’ҢзҰҒз”Ёжё©еәҰдј ж„ҹеҷЁпјӣ
/*йҮҚзҪ®и®ҫеӨҮ*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_PWR_MGMT1_REG, 0x80));
vTaskDelay(100 / portTICK_PERIOD_MS);
/*зҰҒз”ЁзқЎзң жЁЎејҸпјҢйҖүжӢ©XиҪҙйҷҖиһәд»Әдёәж—¶й’ҹжәҗ*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_PWR_MGMT1_REG, 0x01));

- еҸӮж•°пјҡ
| еҸӮж•° | жҸҸиҝ° |
|---|---|
| DEVICE_RESET | дёә1пјҡжүҖжңүеҜ„еӯҳеҷЁйҮҚзҪ®дёәй»ҳи®ӨеҖј |
| SLEEP | дёә1пјҡиҝӣе…Ҙдј‘зң жЁЎејҸ |
| CYCLE | SLEEP=0 && CYCLE = 1 MPUеңЁдј‘зң е’Ңе”ӨйҶ’дёӯеҫӘзҺҜпјҢеҫӘзҺҜе‘Ёжңҹз”ұLP_WAKE_CTRLпјҲеҜ„еӯҳеҷЁ108пјүжқҘзЎ®е®ҡ |
| TEMP_DIS | дёә1пјҡзҰҒз”Ёжё©еәҰдј ж„ҹеҷЁ |
| CLKSEL | жҢҮе®ҡж—¶й’ҹжәҗ |
| CLKSEL | жҸҸиҝ° |
|---|---|
| 0 | дҪҝз”ЁеҶ…йғЁж—¶й’ҹжәҗпјҡ8MHz |
| 1 | XиҪҙйҷҖиһәд»ӘдҪңдёәеҸӮиҖғпјҲдёҖиҲ¬йҖүжӢ©пјү |
| 2 | yиҪҙйҷҖиһәд»ӘдҪңдёәеҸӮиҖғ |
| 3 | ZиҪҙйҷҖиһәд»ӘдҪңдёәеҸӮиҖғ |
| 4 | дҪҝз”ЁеӨ–йғЁж—¶й’ҹжәҗпјҡ32.768MHz |
| 5 | дҪҝз”ЁеӨ–йғЁж—¶й’ҹжәҗпјҡ19.2MHz |
| 6 | дҝқз•ҷ |
| 7 | еҒңз”Ёж—¶й’ҹжәҗпјҢе®ҡж—¶еҷЁеӨҚдҪҚ |
дёҖиҲ¬й…ҚзҪ®:
Power_Management_1 = 0x80пјӣPower_Management_1 = 0x01пјӣжіЁж„ҸпјҡйҮҚзҪ®еҜ„еӯҳеҷЁеҗҺSLEEPиҮӘеҠЁдёә1пјҢ жүҖд»Ҙеҝ…йЎ»и§ЈйҷӨдј‘зң пјҢеҗҰеҲҷжІЎжңүж•°жҚ®иҫ“еҮәгҖӮ
3 Configuration
/*й…ҚзҪ®ж•°еӯ—дҪҺйҖҡж»ӨжіўеҷЁпјҢеёҰе®Ҫдёә5пјҢйҷҖиһәд»Әиҫ“еҮәйў‘зҺҮдёә1kHz*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_CFG_REG, 0x06));
дё»иҰҒз”ЁдәҺй…ҚзҪ®ж•°еӯ—дҪҺйҖҡж»ӨжіўеҷЁпјҲDLPF_CFGпјү,зЎ®е®ҡйҷҖиһәд»Әзҡ„иҫ“еҮәйў‘зҺҮгҖӮ

еҰӮжһңеҗҜз”Ёж•°еӯ—дҪҺйҖҡж»ӨжіўеҷЁпјҲDLPF_CFG != 0 orDLPF_CFG != 7 пјүпјҢеҲҷйҷҖиһәд»Әзҡ„йҮҮж ·йў‘зҺҮеҸӘиғҪдёә1KHzпјҢ
й…ҚзҪ®пјҡ
- Bit2 =1 and Bit1 = 1пјҢжүҖд»ҘпјҢ
Configuration = 0x06
4 SMPRT_DIV
/*й…ҚзҪ®йҮҮж ·йў‘зҺҮ:50Hz*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_SAMPLE_RATE_REG, 19));
и®ҫзҪ®дј ж„ҹеҷЁзҡ„йҮҮж ·йҖҹзҺҮ

йҷҖиһәд»Әзҡ„иҫ“еҮәйў‘зҺҮз”ұDLPF_CFG пјҲеҜ„еӯҳеҷЁ26пјүиҝӣиЎҢй…ҚзҪ®пјҢзӣ®еүҚйҷҖиһәд»Әиҫ“еҮәйў‘зҺҮй…ҚзҪ®дёә1KHzгҖӮ
й…ҚзҪ®пјҡ
- йҮҮж ·йҖҹзҺҮй…ҚзҪ®дёә50HzпјҢз”ұзҹҘпјҢ
SMPRT_DIV = 19
5 Gyroscope Configuration
жҳҜеҗҰеҗҜз”ЁиҮӘжЈҖе’Ңи®ҫзҪ®йҷҖиһәд»ӘйҮҸзЁӢ
/*й…ҚзҪ®йҷҖиһәд»ӘйҮҸзЁӢ:Вұ 2000 В°/s, дёҚиҮӘжЈҖ*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_GYRO_CFG_REG, 0x18));
| еҸӮж•° | жҸҸиҝ° |
|---|---|
| XG_ST | дёә1пјҢеҗҜеҠЁXиҪҙйҷҖиһәд»ӘиҮӘжЈҖ |
| YG_ST | дёә1пјҢеҗҜеҠЁyиҪҙйҷҖиһәд»ӘиҮӘжЈҖ |
| ZG_ST | дёә1пјҢеҗҜеҠЁZиҪҙйҷҖиһәд»ӘиҮӘжЈҖ |
| FS_SEL | и®ҫзҪ®йҷҖиһәд»ӘйҮҸзЁӢ |
иҮӘжЈҖпјҡз®ҖеҚ•зҗҶи§ЈдёәйҮҚж–°и®ҫзҪ®йӣ¶дҪҚпјҲжңүеҸҜиғҪзҗҶи§ЈдёҚеҜ№пјүгҖӮ
йҮҸзЁӢи®ҫзҪ®
| FS_SEL | ж»ЎйҮҸзЁӢ | LSBзҒөж•ҸеәҰ |
|---|---|---|
| 0 | Вұ 250 В°/s | 131 LSB/В°/s |
| 1 | Вұ 500 В°/s | 65.5 LSB/В°/s |
| 2 | Вұ 1000 В°/s | 32.8 LSB/В°/s |
| 3 | Вұ 2000 В°/s | 16.4 LSB/В°/s |
и®ҫзҪ®пјҡ
- дёҖиҲ¬и®ҫзҪ®дёәдёҚиҮӘжЈҖпјҢжңҖеӨ§ж»ЎйҮҸзЁӢпјҡBit4 = 1 & Bit3 = 1, жүҖд»Ҙ
Gyroscope Configuration = 0x18
6 Accelerometer Configuration
й…ҚзҪ®еҠ йҖҹеәҰжҳҜеҗҰиҮӘжЈҖе’ҢйҮҸзЁӢиҢғеӣҙ
/*й…ҚзҪ®еҠ йҖҹеәҰи®ЎйҮҸзЁӢ: Вұ 16gпјҢ дёҚиҮӘжЈҖ*/
ESP_ERROR_CHECK(mpu6050_register_write_byte(MPU_ACCEL_CFG_REG, 0x18));

| еҸӮж•° | жҸҸиҝ° |
|---|---|
| XA_ST | дёә1пјҢеҗҜеҠЁXиҪҙеҠ йҖҹеәҰиҮӘжЈҖ |
| YA_ST | дёә1пјҢеҗҜеҠЁyиҪҙеҠ йҖҹеәҰиҮӘжЈҖ |
| ZA_ST | дёә1пјҢеҗҜеҠЁZиҪҙеҠ йҖҹеәҰиҮӘжЈҖ |
| AFS_SEL | и®ҫзҪ®еҠ йҖҹеәҰйҮҸзЁӢ |
йҮҸзЁӢи®ҫзҪ®
| AFS_SEL | ж»ЎйҮҸзЁӢ | LSBзҒөж•ҸеәҰ |
|---|---|---|
| 0 | Вұ 2g | 16384 LSB/mg |
| 1 | Вұ 4g | 8192 LSB/mg |
| 2 | Вұ 8g | 4096 LSB/mg |
| 3 | Вұ 16g | 2048 LSB/mg |
и®ҫзҪ®пјҡ
- дёҖиҲ¬и®ҫзҪ®дёәдёҚиҮӘжЈҖпјҢжңҖеӨ§ж»ЎйҮҸзЁӢпјҡBit4 = 1 & Bit3 = 1, жүҖд»Ҙ
Gyroscope Configuration = 0x18
иҜ»еҸ–еҺҹе§Ӣж•°жҚ®
д»ҘдёӢд»Јз ҒиҜ»еҸ–жё©еәҰпјҢйҷҖиһәд»ӘпјҢеҠ йҖҹеәҰи®Ўзҡ„еҺҹе§Ӣж•°жҚ®
/**
* @brief иҜ»еҸ–жё©еәҰеҖј
*/
esp_err_t mpu6050_get_temperature(float *temp)
{
int ret;
uint8_t data[2];
int16_t raw;
ret = mpu6050_register_read(MPU_TEMP_OUTH_REG, data, 2);
raw = (int16_t)((data[0] << 8) + data[1]);
*temp = 36.53 + raw/340.0;
return ret;
}
/**
* @brief иҜ»еҸ–йҷҖиһәд»ӘеҖј
*/
esp_err_t mpu6050_get_gyroscope(float *gxyz)
{
int ret;
uint8_t data[6];
int16_t raw_gxyz[3];
float LSB[4] = {131.0, 65.5, 32.8, 16.4};
/*иҜ»еҸ–еҺҹе§Ӣж•°жҚ®*/
ret = mpu6050_register_read(MPU_GYRO_XOUTH_REG, data, 6);
if (ret == ESP_OK)
{
/*иҪ¬еҢ–еҺҹе§Ӣж•°жҚ®*/
raw_gxyz[0] = (int16_t)((data[0] << 8) + data[1]);
raw_gxyz[1] = (int16_t)((data[2] << 8) + data[3]);
raw_gxyz[2] = (int16_t)((data[4] << 8) + data[5]);
}
/*иҜ»еҸ–йҮҸзЁӢ*/
ret = mpu6050_register_read(MPU_GYRO_CFG_REG, data, 1);
if (ret == ESP_OK)
{
uint8_t a = (data[0] & 0X18) >> 3;
printf("ga = %d\n", a);
// е®һйҷ…еҖј
for (uint8_t i = 0; i < 3; i++)
{
gxyz[i] =raw_gxyz[i] / LSB[a];
}
}
return ret;
}
/**
* @brief иҜ»еҸ–еҠ йҖҹеәҰеҖј
*/
esp_err_t mpu6050_get_accelerometer(float *axyz)
{
int ret;
uint8_t data[6];
int16_t raw_axyz[3];
float LSB[4] = {16384.0, 8192.0, 4096.0, 2048.0};
/*еҺҹе§ӢеҖј*/
ret = mpu6050_register_read(MPU_ACCEL_XOUTH_REG, data, 6);
if (ret == ESP_OK)
{
raw_axyz[0] = (int16_t)((data[0] << 8) + data[1]);
raw_axyz[1] = (int16_t)((data[2] << 8) + data[3]);
raw_axyz[2] = (int16_t)((data[4] << 8) + data[5]);
}
/*иҜ»еҸ–йҮҸзЁӢ*/
ret = mpu6050_register_read(MPU_ACCEL_CFG_REG, data, 1);
if (ret == ESP_OK)
{
uint8_t a = (data[0] & 0X18) >> 3 ;
printf("aa = %d\n", a);
/*иҪ¬еҢ–дёәе®һйҷ…еҖј*/
for (uint8_t i = 0; i < 3; i++)
{
axyz[i] =raw_axyz[i] / LSB[a];
}
}
return ret;
}
7 Temperature Measurement
иҜ»еҸ–жё©еәҰзҡ„еҖј
еҮҪж•°esp_err_t mpu6050_get_temperature(float *temp)
еҜ„еӯҳеҷЁ

жҜҸдёӘж•°жҚ®з”ұдёӨдёӘеҜ„еӯҳеҷЁз»„жҲҗпјҢж•°жҚ®жӣҙж–°йҖҹеәҰз”ұеҜ„еӯҳеҷЁ25зҡ„йҮҮж ·йҖҹеәҰжҺ§еҲ¶гҖӮ
е’Ңе®һйҷ…жё©еәҰзҡ„иҪ¬еҢ–е…ізі»пјҡ *temp = 36.53 + raw/340.0;жІЎжңүеңЁжүӢеҶҢдёӯжҹҘеҲ°пјҢжҠ„еҲ«дәәзҡ„д»Јз ҒгҖӮ
8 Gyroscope Measurements
иҜ»еҸ–йҷҖиһәд»Әзҡ„ж•°жҚ®
esp_err_t mpu6050_get_gyroscope(float *gxyz)
еҜ„еӯҳеҷЁпјҡ
жҜҸдёӘж•°жҚ®з”ұдёӨдёӘеҜ„еӯҳеҷЁз»„жҲҗпјҢж•°жҚ®жӣҙж–°йҖҹеәҰз”ұеҜ„еӯҳеҷЁ25зҡ„йҮҮж ·йҖҹеәҰжҺ§еҲ¶
з”ұдәҺXYZзҡ„ж•°жҚ®иҝһз»ӯпјҢжүҖд»ҘзӣҙжҺҘиҜ»дәҶ6дёӘеҖјпјҢе№¶ж №жҚ®LSBиҪ¬еҢ–дёәе®һйҷ…еҖјгҖӮ
9 Accelerometer Measurements
иҜ»еҸ–еҠ йҖҹеәҰзҡ„еҖј
esp_err_t mpu6050_get_accelerometer(float *axyz)
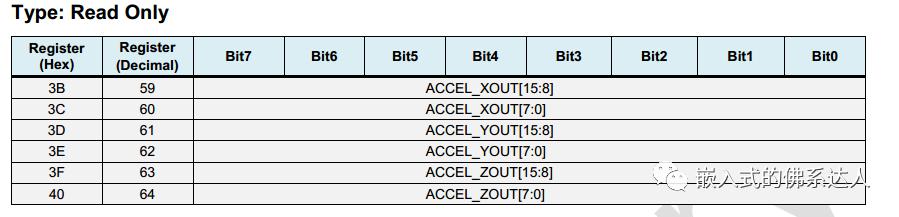
жҜҸдёӘж•°жҚ®з”ұдёӨдёӘеҜ„еӯҳеҷЁз»„жҲҗпјҢж•°жҚ®жӣҙж–°йҖҹеәҰз”ұеҜ„еӯҳеҷЁ25зҡ„йҮҮж ·йҖҹеәҰжҺ§еҲ¶гҖӮ
з”ұдәҺXYZзҡ„ж•°жҚ®иҝһз»ӯпјҢжүҖд»ҘзӣҙжҺҘиҜ»дәҶ6дёӘеҖјпјҢе№¶ж №жҚ®LSBиҪ¬еҢ–дёәе®һйҷ…еҖјгҖӮ
е…¶д»–иҮӘи®Өдёәжңүз”Ёзҡ„еҜ„еӯҳеҷЁ
9 FIFO Enable

- жҸҸиҝ°пјҡеҶіе®ҡе“ӘдәӣеҜ„еӯҳеҷЁзҡ„ж•°жҚ®дјҡиў«ж”ҫе…Ҙзј“еҶІеҷЁдёӯ
| еҸӮж•° | жҸҸиҝ° |
|---|---|
| TEMP_FIFO_EN | жё©еәҰдј ж„ҹеҷЁ |
| XG_FIFO_ENгҖҒYG_FIFO_ENгҖҒZG_FIFO_EN | йҷҖиһәд»Әиҫ“еҮәзҡ„еҜ„еӯҳеҷЁ |
| ACCEL_FIFO_EN | еҠ йҖҹеәҰиҫ“еҮәзҡ„еҜ„еӯҳеҷЁ |
| ... | еҗҺйқўдёүдёӘжңӘеҒҡдәҶи§Ј |
10 Interrupt Enable

- жҸҸиҝ°пјҢжҳҜеҗҰдҪҝиғҪзӣёеә”дёӯж–ӯ
11 User Control

- жҸҸиҝ°пјҡй…ҚзҪ®жҳҜеҗҰеҗҜз”ЁFIFOпјҢIICзҡ„дё»д»ҺпјҢйҮҚзҪ®FIFOе’Ңдј ж„ҹеҷЁ
| еҸӮж•° | жҸҸиҝ° |
|---|---|
| FIFO_EN | дҪҝиғҪFIFO |
| I2C_MST_EN | дҪҝиғҪi2cдёәдё»жЁЎејҸ |
| I2C_IF_DIS | зҰҒз”ЁI2cпјҢеҗҜз”ЁSPI |
| FIFO_RESET | йҮҚзҪ®FIFO |
| I2C_MST_RESET | йҮҚзҪ®I2Cдё»жЁЎејҸпјҢйҮҚзҪ®д»ҘеҗҺиҮӘеҠЁеҸҳдёә0 |
| SIG_COND_RESET | йҮҚзҪ®жүҖжңүдј ж„ҹеҷЁ |
иҜ»еҸ–з»“жһң
е°ҶMPU6050йқҷжӯўе№іж”ҫеңЁжЎҢйқўдёҠпјҢиҺ·еҸ–иҝһз»ӯ3з§’зҡ„ж•°жҚ®гҖӮ
while (1)
{
ESP_ERROR_CHECK(mpu6050_get_temperature(&temp));
ESP_LOGI(TAG, "temp = %.2f", temp);
ESP_ERROR_CHECK(mpu6050_get_gyroscope(gxyz));
ESP_LOGI(TAG, "gx = %.2f\t gy = %.2f\t gz = %.2f", gxyz[0], gxyz[1], gxyz[2]);
ESP_ERROR_CHECK(mpu6050_get_accelerometer(axyz));
ESP_LOGI(TAG, "ax = %.2f\t ay = %.2f\t az = %.2f", axyz[0], axyz[1], axyz[2]);
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
иҜ»еҸ–е‘Ёжңҹдёә1S
I (6415) mpu6050-example: temp = 25.52
I (6415) mpu6050-example: gx = -4.21 gy = -0.49 gz = -1.59
I (6415) mpu6050-example: ax = 0.11 ay = 0.03 az = 1.03
I (7415) mpu6050-example: temp = 25.55
I (7415) mpu6050-example: gx = -4.21 gy = -0.49 gz = -1.59
I (7415) mpu6050-example: ax = 0.11 ay = 0.03 az = 1.04
I (8415) mpu6050-example: temp = 25.55
I (8415) mpu6050-example: gx = -4.21 gy = -0.49 gz = -1.59
I (8415) mpu6050-example: ax = 0.11 ay = 0.03 az = 1.04
е®ҡжҖ§еҲҶжһҗпјҡ
- жё©еәҰпјҡиҠҜзүҮж‘ёзқҖдёҚеҸ‘зғ«пјҢ25еәҰе·ҰеҸіз®—жӯЈеёёпјӣ
- йҷҖиһәд»ӘпјҡзҗҶи®әдёҠзҰҒжӯўпјҢйҷҖиһәд»Әзҡ„ж•°жҚ®еә”иҜҘдёә0пјҢдҪҶжҳҜе®һйҷ…дёҠеӯҳеңЁдёҖзӮ№ж•°жҚ®пјҢеҺҹеӣ дёәжӯўпјӣ
- еҠ йҖҹеәҰи®Ўпјҡйқҷжӯўж—¶пјҢеҠ йҖҹеәҰзҡ„еҗҲеҠӣеә”иҜҘдёә9.8пјҢзӣ®еүҚеҗҲеҠӣдј°и®Ўдёә10е·ҰеҸіпјҢиҜҙжҳҺиҜ»еҸ–зҡ„ж•°жҚ®еҹәжң¬жӯЈеёёгҖӮ
д»Һе®ҡжҖ§еҲҶжһҗзҡ„и§’еәҰжқҘиҜҙпјҢж №жҚ®datasheedй…ҚзҪ®еә”иҜҘжІЎжңүй”ҷгҖӮ
дёӢдёҖжӯҘи®ЎеҲ’
еҺҹе§Ӣж•°жҚ®ж„Ҹд№үдёҚеӨ§пјҢзәҜзІ№з”ЁдәҺеӯҰд№ гҖӮеҗҺйқўе°ҶиҝӣдёҖжӯҘиһҚеҗҲиҺ·еҸ–欧жӢүи§’гҖӮ
- дҪҝз”ЁMDPиһҚеҗҲпјӣ
- дҪҝз”ЁеҚЎе°”жӣјж»ӨжіўиһҚеҗҲпјӣ