XR806-移жӨҚrosserial-дёІеҸЈйҖҡдҝЎ
XR806з®Җд»Ӣ
rosserialз®Җд»Ӣ
移жӨҚпјҡдёІеҸЈйҖҡдҝЎ
rosserialжәҗз ҒиҺ·еҸ–
ROSserial移жӨҚж ёеҝғ
XR806 C++ж”ҜжҢҒ
дёІеҸЈ
д»Јз ҒйЈҺж јз»ҹдёҖ
й…ҚзҪ®ж–Ү件`BUILD.gn`
жөӢиҜ•
XR806з«Ҝ
зј–иҜ‘зЁӢеәҸ
PC ROS з«Ҝ
ж•Ҳжһң
жҖ»з»“е’Ңе®Ңе–„д№ӢеӨ„
XR806з®Җд»Ӣ
жқҝеӯҗжқҘжәҗдәҺжһҒжңҜзӨҫеҢәзҡ„иҜ•з”ЁпјҢXR806зҡ„еңЁзәҝзҪ‘еқҖ
 c.png
c.pngе…¶дё»иҰҒеҸӮж•°пјҡ
| дё»жҺ§ | XR806AF2L |
|---|---|
| DDR | SIP 288KB SRAM |
| еӯҳеӮЁ | SIP 160KB Code ROM. SIP 16Mbit Flash. |
| еӨ©зәҝ | жқҝиҪҪWiFi/BTеҸҢеӨ©зәҝпјҢеҸҜе…ұеӯҳ |
| жҢүй”® | rebootжҢүй”® 1пјҢеҠҹиғҪжҢүй”® 1 |
| зҒҜ | зәўиүІз”өжәҗжҢҮзӨәзҒҜ 1пјҢи“қиүІеҸҜи°ғиҠӮLED 1 |
| дҫӣз”ө | Type-C 5V |
| еј•и„ҡ | жҸ’й’Ҳеј•и„ҡ *9 |
| и°ғиҜ•ж–№ејҸ | Type-CпјҲе·ІжқҝиҪҪдёІеҸЈиҪ¬USBиҠҜзүҮпјү |
| жҷ¶жҢҜ | еӨ–жҺҘ40MHzжҷ¶жҢҜ |
rosserialз®Җд»Ӣ
е®ҳзҪ‘
rosserialжҳҜз”ЁдәҺйқһROSи®ҫеӨҮдёҺROSи®ҫеӨҮиҝӣиЎҢйҖҡдҝЎзҡ„дёҖз§ҚеҚҸи®®гҖӮе®ғдёәйқһROSи®ҫеӨҮзҡ„еә”з”ЁзЁӢеәҸжҸҗдҫӣдәҶROSиҠӮзӮ№е’ҢжңҚеҠЎзҡ„еҸ‘еёғ/и®ўйҳ…еҠҹиғҪпјҢдҪҝеңЁйқһROSзҺҜеўғдёӯиҝҗиЎҢзҡ„еә”з”ЁиғҪеӨҹйҖҡиҝҮдёІеҸЈжҲ–зҪ‘з»ңиғҪеӨҹиҪ»жқҫең°дёҺROSеә”з”ЁиҝӣиЎҢж•°жҚ®дәӨдә’гҖӮ
rosserialеҲҶдёәе®ўжҲ·з«Ҝе’ҢжңҚеҠЎеҷЁдёӨйғЁеҲҶгҖӮrosserialе®ўжҲ·з«ҜиҝҗиЎҢеңЁиҝҗиЎҢеңЁжІЎжңүе®үиЈ…ROSзҡ„зҺҜеўғзҡ„еә”з”ЁдёӯпјҢйҖҡиҝҮдёІеҸЈжҲ–зҪ‘з»ңдёҺиҝҗиЎҢеңЁROSзҺҜеўғдёӯзҡ„rosserialжңҚеҠЎеҷЁиҝһжҺҘпјҢ并йҖҡиҝҮжңҚеҠЎеҷЁиҠӮзӮ№еңЁROSдёӯеҸ‘еёғ/и®ўйҳ…иҜқйўҳгҖӮ
жң¬ж¬Ўиҝҷ移жӨҚrosserialе®ўжҲ·з«ҜеҲ°XR806дёҠ
移жӨҚпјҡдёІеҸЈйҖҡдҝЎ
rosserialжәҗз ҒиҺ·еҸ–
е®ҳж–№жәҗз Ғ
иҜҘд»“еә“дёӯзҡ„д»Јз ҒйңҖиҰҒзј–иҜ‘жүҚиғҪиҺ·еҸ–жәҗз ҒпјҢдёәдәҶзӣҙжҺҘиҺ·еҸ–жәҗз ҒпјҢдҪҝз”Ёд»ҘдёӢд»“еә“зҡ„жәҗз ҒеҒҡдёәеҹәзЎҖ
дҪҝз”Ёжәҗз Ғ
иҜҘд»Јз Ғж—¶еұһдәҺRT-threadиҪҜ件еҢ…е°ұжңүиҫғй«ҳзҡ„еҸҜдҝЎеәҰгҖӮ
cloneдёӢжқҘзҡ„д»Јз Ғж”ҫеңЁ/ohosdemo/rosserialдёӯпјҢж–Ү件结жһ„пјҡ
tree -L 1
.
в”ңв”Җв”Җ BUILD.gn
в”ңв”Җв”Җ inc
в”ңв”Җв”Җ port
в””в”Җв”Җ src
- BUILD.gn пјҡй…ҚзҪ®ж–Ү件
- inc пјҡrosserialжәҗж–Ү件
- portпјҡ移жӨҚж–Ү件пјҲдёәдәҶе’ҢXR806йҖӮй…Қзҡ„д»Јз Ғж”ҫеңЁиҜҘж–Ү件дёӢпјү
ROSserial移жӨҚж ёеҝғ
ж №жҚ®е®ҳзҪ‘зҡ„移жӨҚд»Ӣз»ҚпјҢеҸӘйңҖиҰҒеЎ«еҶҷе®Ңд»ҘдёӢжЁЎжқҝеҚіеҸҜпјҡ
class Hardware
{
Hardware();
// any initialization code necessary to use the serial port
void init();
// read a byte from the serial port. -1 = failure
int read()
// write data to the connection to ROS
void write(uint8_t* data, int length);
// returns milliseconds since start of program
unsigned long time();
};
init()пјҡжҸҗдҫӣеҲқе§ӢеҢ–еҮҪж•°пјҢеҲқе§ӢеҢ–дёІеҸЈжҲ–иҖ…TCPзҪ‘з»ңread():иҜ»еҸ–дёҖдёӘеӯ—иҠӮwrite(uint8_t* data, int length):еҶҷеӯ—з¬Ұtime()пјҡжҸҗдҫӣж—¶й—ҙеҹәеҮҶ
еҸҰеӨ–пјҢд»Јз Ғдёәc++пјҢйңҖиҰҒXR806ж”ҜжҢҒC++зј–иҜ‘
XR806 C++ж”ҜжҢҒ
/device/xradio/xr806/liteos_m/config.gniж–Ү件пјҢж·»еҠ д»ҘдёӢеҶ…е®№пјҡboard_cxx_flags = []
board_cxx_flags += SDK_cflags
board_cxx_flags += [
"-includelog/log.h",
"-DVIRTUAL_HCI",
"-DCONFIG_ARM",
#"-DNULL=((void*)0)",
#"-std=c++17",
"-lstdc++",
"-fno-rtti",
"-fno-exceptions"
]
еӨ§йғЁеҲҶе’Ңboard_cflagsзҡ„й…ҚзҪ®дёҖж ·пјҢж·»еҠ зҡ„зј–иҜ‘йЎ№"-lstdc++",-fno-rtti,-fno-exceptionжҳҜдёәдәҶи§ЈеҶід»ҘдёӢй”ҷиҜҜпјҡ
undefined reference to `vtable for __cxxabiv1::__si_class_type_info'
иҜҘй”ҷиҜҜзҡ„еҺҹеӣ жҳҜC++еңЁй“ҫжҺҘж—¶дјҡжңүзӣёе…іеә“й“ҫжҺҘдёҚдёҠ
/ohosdemo/rosserial/BUILD.gnдёӯж·»еҠ д»ҘдёӢд»Јз Ғпјҡcflags_cc = board_cxx_flags
дёІеҸЈ
е’ҢдёІеҸЈзӣёе…ізҡ„д»Јз Ғж”ҫеңЁrosserial/port/UartHaedware.h
е…ій”®д»Јз Ғпјҡ
дёІеҸЈеҲқе§ӢеҢ–пјҡinit()еҮҪж•°
void init()
{
// HAL_Status status = HAL_ERROR;
UART_InitParam param;
param.baudRate = this->baudRate;
param.dataBits = UART_DATA_BITS_8;
param.stopBits = UART_STOP_BITS_1;
param.parity = UART_PARITY_NONE;
param.isAutoHwFlowCtrl = 0;
HAL_UART_Init(UARTID, ¶m);
}
дёІеҸЈиҜ»еҸ–дёҖдёӘеӯ—иҠӮпјҡread()еҮҪж•°
int read()
{
uint8_t rx_data;
int32_t len=0;
len = HAL_UART_Receive_IT(UARTID,&rx_data,1,1000);
if(len>0)
{
return rx_data;
}
else return -1;
}
дёІеҸЈеҶҷеӯ—иҠӮпјҡwrite(uint8_t* data, int length)
// write data to the connection to ROS
void write(uint8_t* data, int length)
{
HAL_UART_Transmit_IT(UARTID, data, length);
}
ж—¶й—ҙеҹәеҮҶпјҡtime()еҮҪж•°
// returns milliseconds since start of program
unsigned long time()
{
unsigned long temp = (unsigned long)OS_GetTime() * 1000;
return temp;
}
д»Јз ҒйЈҺж јз»ҹдёҖ
дёәдәҶдҝқжҢҒROSд»Јз Ғзҡ„зј–еҶҷйЈҺж јдёҖиҮҙпјҢж·»еҠ ``rosserial/port/ros.h`
е…ій”®д»Јз Ғпјҡ
#define ROS_USE_TCP 0
#define ROS_USE_UART 1
namespace ros
{
#if ROS_USE_TCP == 1
typedef NodeHandle_<TCPHardware> NodeHandle;
#endif
#if ROS_USE_UART == 1
typedef NodeHandle_<Hardware> NodeHandle;
#endif
}
#endif
й…ҚзҪ®ж–Ү件BUILD.gn
# еҝ…йЎ»пјҢconfigдёӯе®ҡд№үдәҶеӨҙж–Ү件и·Ҝеҫ„е’Ңе…ій”®е®Ҹе®ҡд№ү
import("//device/xradio/xr806/liteos_m/config.gni")
# еҝ…йЎ»пјҢжүҖжңүеә”з”Ёе·ҘзЁӢеҝ…йЎ»жҳҜapp_жү“еӨҙ
static_library("app_rosserial")
{
configs = []
sources = [
"src/ros_helloworld.cpp",
"inc/duration.cpp",
"inc/time.cpp",
]
#еҝ…йЎ»пјҢboard_cflagsжҳҜеңЁconfig.gniдёӯе®ҡд№үзҡ„е…ій”®е®Ҹе®ҡд№ү
cflags = board_cflags
# c++
cflags_cc = board_cxx_flags
#еҝ…йЎ»пјҢboard_include_dirsжҳҜеңЁconfig.gniдёӯе®ҡд№үзҡ„ж–Ү件и·Ҝеҫ„
include_dirs = board_include_dirs
# ж №жҚ®е®һйҷ…жғ…еҶөж·»еҠ еӨҙж–Ү件и·Ҝеҫ„
include_dirs += [
"//kernel/liteos_m/kernel/arch/include",
"./../wlan_demo/",
"inc",
"port" ,
"//base/iot_hardware/peripheral/interfaces/kits",
"//foundation/communication/wifi_lite/interfaces/wifiservice",
]
}
жөӢиҜ•
XR806з«Ҝ
- зј–еҶҷдёҖдёӘеҸ‘еёғиҜқйўҳпјҡXR806_to_ROS
еҸ‘еёғзҡ„еҶ…е®№дёәвҖңhello world!вҖқпјҢж—¶й—ҙй—ҙйҡ”дёә1s
- зј–еҶҷдёҖдёӘжҺҘ收иҜқйўҳпјҡROS_to_XR860
жҺҘ收зҡ„еҶ…е®№йҖҡиҝҮдёІеҸЈжҳҫзӨәеҮәжқҘ
жөӢиҜ•д»Јз ҒеңЁ/rosserial/src/ros_helloworld.cpp
#include <ros.h>
#include <std_msgs/String.h>
#include <stdio.h>
#include "ohos_init.h"
#include <stdlib.h>
//дҝЎеҸ·йҮҸзҡ„еЈ°жҳҺ
// #include "wlan_demo/test_case.h"
static OS_Thread_t g_main_thread;
extern OS_Semaphore_t ros_sem;
static ros::NodeHandle nh;
static std_msgs::String str_msg;
static ros::Publisher chatter("XR806_to_ROS", &str_msg);
static char hello_msg[25] = "hello world!";
// еӣһи°ғеҮҪж•°
static void message_callback(const std_msgs::String& msgs)
{
printf("\r\nresive:%s\r\n", msgs.data);
}
static ros::Subscriber<std_msgs::String> sub("ROS_to_XR860", &message_callback);
static void ROSThread(void *arg)
{
//зӯүеҫ…дҝЎеҸ·йҮҸжңүж•Ҳ
// if (OS_SemaphoreWait(&ros_sem, OS_WAIT_FOREVER) == OS_OK)
// {
printf("\r\n--------- star ROS----------------\r\n");
nh.initNode();
nh.advertise(chatter);
nh.subscribe(sub);
while (1)
{
if (nh.connected())
{
str_msg.data = hello_msg;
chatter.publish(&str_msg);
}
nh.spinOnce();
OS_MSleep(1000);
}
// }
}
void ROSMain(void)
{
printf("\r\nROSserial Start\r\n");
if (OS_ThreadCreate(&g_main_thread, "ROSThread", ROSThread, NULL,
OS_THREAD_PRIO_APP, 4 * 1024) != OS_OK) {
printf("[ERR] Create MainThread Failed\n");
}
}
SYS_RUN(ROSMain);
зј–иҜ‘зЁӢеәҸ
hb build -f
еҸҜиғҪдјҡйҒҮеҲ°дёӢйқўй—®йўҳпјҡ
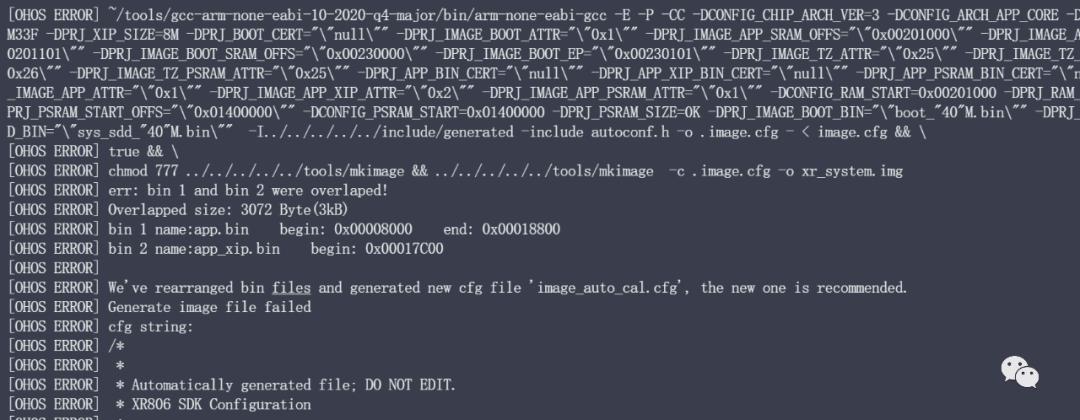
иҝҷдёӘflashеҲҶй…Қзҡ„еҲҶй…Қжңүй—®йўҳпјҡ
cd еҲ° device/xradio/xr806/xr_skylark/project/demo/audio_demo/image/xr806
з”Ёж–Ү件image_auto_cal.cfgдёӯзҡ„еҶ…е®№иҰҶзӣ–image_wlan_ble.cfgдёӯзҡ„еҶ…е®№гҖӮ
PC ROS з«Ҝ
UbuntuзүҲжң¬пјҡ20зүҲпјҲ18зүҲд№ҹеҸҜд»ҘдҪҝз”Ёпјү
mkdir -p rosworkspace/src
cd rosworkspace
catkin_make
ж–Ү件еҗҚпјҡtest_pub.py
import rospy
from std_msgs.msg import String
if __name__ == "__main__":
#2.еҲқе§ӢеҢ– ROS иҠӮзӮ№:е‘ҪеҗҚ(е”ҜдёҖ)
rospy.init_node("talker_p")
#3.е®һдҫӢеҢ– еҸ‘еёғиҖ… еҜ№иұЎ
pub = rospy.Publisher("ROS_to_XR860",String,queue_size=10)
#4.з»„з»Үиў«еҸ‘еёғзҡ„ж•°жҚ®пјҢ并编еҶҷйҖ»иҫ‘еҸ‘еёғж•°жҚ®
msg = String() #еҲӣе»ә msg еҜ№иұЎ
msg_front = "hello XR806 "
count = 0 #и®Ўж•°еҷЁ
# и®ҫзҪ®еҫӘзҺҜйў‘зҺҮ
rate = rospy.Rate(1)
while not rospy.is_shutdown():
#жӢјжҺҘеӯ—з¬ҰдёІ
msg.data = msg_front + str(count)
pub.publish(msg)
rate.sleep()
#rospy.loginfo("еҶҷеҮәзҡ„ж•°жҚ®:%s",msg.data)
count += 1
CMakeLists.txtж”ҜжҢҒpythonд»Јз Ғпјҡ
catkin_install_python(PROGRAMS
scripts/test_pub.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
ж•Ҳжһң
ж“ҚдҪң
PCз«Ҝ
roscore
source ./devel/setup.bash
rosrun ros_test test_pub.py
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0 _baud:=115200
еҰӮжһңдёІеҸЈиҝһжҺҘжҲҗеҠҹпјҢз»Ҳз«ҜжҳҫзӨәпјҡ
INFO] [1640087588.757505]: ROS Serial Python Node
[INFO] [1640087588.762633]: Connecting to /dev/ttyUSB0 at 115200 baud
[INFO] [1640087591.079099]: Requesting topics...
[INFO] [1640087591.131236]: Note: publish buffer size is 512 bytes
[INFO] [1640087591.134777]: Setup publisher on XR806_to_ROS [std_msgs/String]
[INFO] [1640087591.142147]: Note: subscribe buffer size is 512 bytes
[INFO] [1640087591.144610]: Setup subscriber on ROS_to_XR860 [std_msgs/String]
еҸҜи§ҒиҜқйўҳзҡ„жҸҗзӨәгҖӮ
жіЁж„ҸжҹҘзңӢдёІеҸЈзҡ„жқғйҷҗпјҢеҰӮжһңжқғйҷҗдёҚи¶іпјҢе…ҲејҖеҗҜжқғйҷҗпјҡ
# жҹҘзңӢжқғйҷҗ
ll /dev/ttyUSB*
#ејҖеҗҜжқғйҷҗ
sudo chmod 777 /dev/ttyUSB*
XR806з«Ҝ
зӣҙжҺҘдёӢиҪҪд»Јз ҒпјҢеӨҚдҪҚпјҡ
з»“жһң
haijun@ubuntu:~$ rostopic list
/ROS_to_XR860
/XR806_to_ROS
/diagnostics
/rosout
/rosout_agg
еҸҜи§Ғ /ROS_to_XR860е’Ң/XR806_to_ROSдёӨдёӘиҜқйўҳ
rostopic echo /ROS_to_XR860
data: "hello world!"
---
data: "hello world!"
---
data: "hello world!"
---
data: "hello world!"
---
data: "hello world!"
---
-------- star ROS----------------
hiview init success.led mainй”ӣ?IoTGpioInit port0, pin21
console init success
resive:hello XR806 1
resive:hello XR806 2
resive:hello XR806 3
resive:hello XR806 4
resive:hello XR806 5
resive:hello XR806 6
resive:hello XR806 7
resive:hello XR806 8
resive:hello XR806 9
resive:hello XR806 10
resive:hello XR806 11
resive:hello XR806 12
жҖ»з»“е’Ңе®Ңе–„д№ӢеӨ„
зӣ®еүҚrosserialзҡ„дёІеҸЈйҖҡдҝЎжІЎжңүй—®йўҳпјҢTCPе®ўжҲ·з«ҜдёҖзӣҙиҝһдёҚдёҠTCPжңҚеҠЎеҷЁгҖӮзӯүеӨ§зҘһ们ејҖж”ҫдәҶtcpйҖҡдҝЎзҡ„зӣёе…ід»Јз ҒеҗҺеҶҚжҠҠTCPйҖҡдҝЎз§»жӨҚиҝҮжқҘгҖӮ
зӯүд»ҘеҗҺ移жӨҚдәҶTCPйҖҡдҝЎзҡ„д»Јз ҒеҶҚжҠҠд»Јз Ғж”ҫеҮәжқҘпјҲзӣ®еүҚд»Јз ҒжңүTCPйҖҡдҝЎйғЁеҲҶпјҢдҪҶжҳҜдёҚеҘҪз”ЁпјҢеҲҶзҰ»еҸҲжңүзӮ№йә»зғҰпјү