еүҚиЁҖ
еүҚйқўдёҖзҜҮжҲ‘们е®һзҺ°дәҶIOжЁЎжӢҹUARTеҸ‘йҖҒ,жҲ‘们继з»ӯжқҘе®һзҺ°UARTжҺҘ收гҖӮеҜ№дәҺжҺҘ收еә•еұӮиө„жәҗйңҖиҰҒдёҖдёӘиҫ“е…ҘIOдё”е…¶еҸҜй…ҚзҪ®дҪҚдёӢйҷҚжІҝдёӯж–ӯ,е’ҢдёҖдёӘе®ҡж—¶еҷЁеҚіеҸҜгҖӮ
е®һзҺ°иҝҮзЁӢ
жңүдәҶеҸ‘йҖҒзҡ„е®һзҺ°,жҲ‘们дҫқи‘«иҠҰз”»з“ў,жҢүз…§еҸ‘йҖҒзҡ„жЁЎејҸиҝӣиЎҢе®һзҺ°,еҸӘжҳҜдёҖдёӘжҳҜеҸ‘йҖҒдёҖдёӘжҳҜжҺҘ收гҖӮзҠ¶жҖҒжңәе®һзҺ°зҡ„иҝҮзЁӢжҳҜзұ»дјјзҡ„гҖӮ
еҗҜеҠЁжҺҘ收еҚідҪҝиғҪRXеј•и„ҡзҡ„дёӢйҷҚжІҝдёӯж–ӯ,з”ЁдәҺжЈҖжөӢиө·е§ӢдҪҚгҖӮеңЁдёӯж–ӯеӣһи°ғдёӯеҗҜеҠЁе®ҡж—¶еҷЁе»¶иҝҹ1.5дёӘдҪҚе®ҪеҚіеҸҜйҮҮж ·з¬¬дёҖдёӘbitж•°жҚ®гҖӮе®ҡж—¶еҷЁдёӯж–ӯеӣһи°ғдёӯиҝӣиЎҢзҠ¶жҖҒжңәеӨ„зҗҶпјҢй…ҚзҪ®е®ҡж—¶еҷЁжҜҸйҡ”дёҖдёӘbitйҮҮж ·дёҖж¬ЎпјҢ继з»ӯеӨ„зҗҶеҗҺз»ӯдҪҚгҖӮзӣҙеҲ°еӨ„зҗҶе®ҢжүҖжңүдҪҚпјҢ然еҗҺи°ғз”ЁжҺҘ收еӣһи°ғпјҢ并继з»ӯдёӢдёҖдёӘеҫӘзҺҜгҖӮ
ж•°жҚ®з»“жһ„
е’ҢеҸ‘йҖҒзұ»дјј,еҸӘжҳҜTXиҫ“еҮәеј•и„ҡж”№дёәRXжҺҘ收пјҢ并且йңҖиҰҒжҸҗдҫӣдёӢйҷҚжІҝдёӯж–ӯй…ҚзҪ®жҺҘеҸЈгҖӮ
ж•ҙдёӘж•°жҚ®з»“жһ„еҰӮдёӢ
typedef uint8_t (*io_uart_rx_rd_pf)(void); /**< RXиҜ»жҺҘеҸЈ */typedef void (*io_uart_rx_set_eint_pf)(uint8_t enable, void(*)(void*)); /**< RXжҺҘеҸЈи®ҫзҪ®дёӢйҷҚжІҝеӣһи°ғ */typedef void (*io_uart_rx_time_set_period_pf)(uint32_t t, void(*)(void*)); /**< е®ҡж—¶еҷЁи®ҫзҪ®е‘ЁжңҹжҺҘеҸЈ,еҚ•дҪҚжіўзү№зҺҮ */typedef void (*io_uart_rx_time_ctrl_pf)(uint8_t onoff); /**< е®ҡж—¶еҷЁеҗҜеҒңжҺ§еҲ¶жҺҘеҸЈ */typedef void (*io_uart_rx_cb_pf)(uint8_t val); /**< жҺҘ收еҲ°еӯ—иҠӮеӣһи°ғ */typedef void (*io_uart_rx_init_pf)(void); /**< еә•еұӮжҺҘеҸЈеҲқе§ӢеҢ– */typedef void (*io_uart_rx_deinit_pf)(void); /**< еә•еұӮжҺҘеҸЈи§ЈйҷӨеҲқе§ӢеҢ– */
/** * \struct io_uart_rx_e * жҺҘ收зҠ¶жҖҒжһҡдёҫ */typedef enum{ IO_UART_RX_STATE_DIS = 0, /**< еҒңжӯўзҠ¶жҖҒ */ IO_UART_RX_STATE_IDLE = 1, /**< з©әй—Ізӯүеҫ…RXдёӢйҷҚжІҝйҳ¶ж®ө */ IO_UART_RX_STATE_START = 2, /**< иө·е§ӢдҪҚйҳ¶ж®ө */ IO_UART_RX_STATE_DATA = 3, /**< ж•°жҚ®дҪҚйҳ¶ж®ө */ IO_UART_RX_STATE_PARITY = 4, /**< ж ЎйӘҢдҪҚйҳ¶ж®ө */ IO_UART_RX_STATE_STOP = 5, /**< еҒңжӯўдҪҚйҳ¶ж®ө */} io_uart_rx_e;
/** * \struct io_uart_rx_patity_e * ж ЎйӘҢжһҡдёҫ */typedef enum{ IO_UART_RX_PARITY_NONE = 0, /**< ж— ж ЎйӘҢ */ IO_UART_RX_PARITY_ODD = 1, /**< еҘҮж ЎйӘҢ */ IO_UART_RX_PARITY_EVEN = 2, /**< еҒ¶ж ЎйӘҢ */ IO_UART_RX_PARITY_0 = 3, /**< еӣәе®ҡ0ж ЎйӘҢ */ IO_UART_RX_PARITY_1 = 4, /**< еӣәе®ҡ1ж ЎйӘҢ */} io_uart_rx_patity_e;
/** * \struct io_uart_rx_dev_st * жҺҘ收зҠ¶жҖҒжңәз»“жһ„дҪ“ */typedef struct { io_uart_rx_e state; /**< жҺҘ收主зҠ¶жҖҒ */ uint8_t state_s; /**< жҺҘ收еӯҗзҠ¶жҖҒ */ uint8_t data; /**< еҫ…еҸ‘йҖҒзҡ„еӯ—иҠӮж•°жҚ® */ uint8_t cal_parity; /**< и®Ўз®—зҡ„ж ЎйӘҢдҪҚ */ io_uart_rx_patity_e parity; /**< ж ЎйӘҢ */ uint8_t stop; /**< еҒңжӯўдҪҚ */ uint8_t data_len; /**< ж•°жҚ®й•ҝ */ uint32_t baud; /**< жіўзү№зҺҮ */ io_uart_rx_rd_pf rx_rd; /**< RDиҜ»жҺҘеҸЈ */ io_uart_rx_set_eint_pf set_int; /**< и®ҫзҪ®RXдёӢйҷҚжІҝдёӯж–ӯжҺҘеҸЈ */ io_uart_rx_init_pf init; /**< жҺҘеҸЈеҲқе§ӢеҢ– */ io_uart_rx_deinit_pf deinit; /**< жҺҘеҸЈи§ЈйҷӨеҲқе§ӢеҢ– */ io_uart_rx_time_set_period_pf time_set_period; /**< е®ҡж—¶еҷЁи®ҫзҪ®е‘ЁжңҹжҺҘеҸЈ,еҚ•дҪҚuS */ io_uart_rx_time_ctrl_pf time_ctrl; /**< е®ҡж—¶еҷЁеҗҜеҒңжҺ§еҲ¶ */ io_uart_rx_cb_pf rx_cb; /**< жҺҘ收еҲ°еӯ—иҠӮеӣһи°ғ */} io_uart_rx_dev_st; жҺҘеҸЈ
еҸӘйңҖиҰҒеҲқе§ӢеҢ–е’Ңи§ЈйҷӨеҲқе§ӢеҢ–жҺҘеҸЈ
еҶҚеҠ дёҖдёӘжҺ§еҲ¶еҷЁеҗҜеҒңзҡ„жҺҘеҸЈгҖӮ
/** * \fn io_uart_rx_ctrl * еҗҜеҠЁжҲ–еҒңжӯўжҺҘ收 * \param[in] dev \ref io_uart_rx_dev_st * \param[in] onoff дҪҝиғҪжҲ–иҖ…еҒңжӯўжҺҘ收 * \retval 0 жҲҗеҠҹ * \retval е…¶д»–еҖј еӨұиҙҘ */int io_uart_rx_ctrl(io_uart_rx_dev_st* dev, uint8_t onoff);
/** * \fn io_uart_rx_init * еҲқе§ӢеҢ– * \param[in] dev \ref io_uart_rx_dev_st*/void io_uart_rx_init(io_uart_rx_dev_st* dev);
/** * \fn io_uart_rx_deinit * и§ЈйҷӨеҲқе§ӢеҢ– * \param[in] dev \ref io_uart_rx_dev_st*/void io_uart_rx_deinit(io_uart_rx_dev_st* dev);е®һзҺ°
еҲқе§ӢеҢ–и§ЈйҷӨеҲқе§ӢеҢ–
void io_uart_rx_init(io_uart_rx_dev_st* dev){ if(dev == 0) { return; } if(dev->init == 0) { return; } dev->init();}
void io_uart_rx_deinit(io_uart_rx_dev_st* dev){ if(dev == 0) { return; } if(dev->deinit == 0) { return; } dev->deinit();}еҗҜеҠЁжҺҘ收пјҢеҚідҪҝиғҪдёӢйҷҚжІҝдёӯжЈҖжөӢиө·е§ӢдҪҚпјҢжЈҖжөӢеҲ°дёӢйҷҚжІҝеӣһи°ғio_uart_rx_start并еҒңжӯўеӨ–йғЁдёӯж–ӯжЈҖжөӢпјҢдәӨз»ҷе®ҡж—¶йҮҮж ·еӨ„зҗҶгҖӮ
static void io_uart_rx_start(void* p){ io_uart_rx_dev_st* dev = (io_uart_rx_dev_st*)p; /* жЈҖжөӢеҲ°дёӢйҷҚжІҝдёӯж–ӯж—¶и°ғз”Ё */ dev->set_int(0,0); /* е…ій—ӯеӨ–йғЁдёӯй—ҙжЈҖжөӢ */ dev->time_set_period(dev->baud*2/3,io_uart_rx_handle); /* и®ҫзҪ®1.5дҪҚе®Ҫзҡ„е‘Ёжңҹ,е‘ЁжңҹеҲ°дәҶеӣһи°ғio_uart_tx_handle йҮҮж ·з¬¬дёҖдёӘж•°жҚ® */ dev->time_ctrl(1); dev->state = IO_UART_RX_STATE_DATA; /* жӣҙж–°зҠ¶жҖҒеҲ°ж•°жҚ®йҳ¶ж®ө,зӣҙжҺҘ延иҝҹи·іиҝҮ1дёӘе‘Ёжңҹзҡ„ејҖе§ӢдҪҚпјҢ并且延иҝҹ0.5дёӘе‘ЁжңҹеҲ°дҪҚдёӯй—ҙйҮҮж · */ dev->cal_parity = 0; /* еҲқе§ӢеҢ–дҝЎжҒҜ */ dev->state_s = 0; dev->data = 0;}
int io_uart_rx_ctrl(io_uart_rx_dev_st* dev, uint8_t onoff){ if(dev == 0) { return -1; } if(onoff != 0) { dev->set_int(1,io_uart_rx_start); /* дҪҝиғҪеӨ–йғЁдёӯй—ҙжЈҖжөӢ */ dev->state = IO_UART_RX_STATE_IDLE; /* жӣҙж–°зҠ¶жҖҒ */ } else { dev->set_int(0,0); /* е…ій—ӯеӨ–йғЁдёӯй—ҙжЈҖжөӢ */ dev->time_ctrl(0); /* еҒңжӯўе®ҡж—¶еҷЁ */ dev->state = IO_UART_RX_STATE_DIS; /* и®ҫзҪ®еҒңжӯўзҠ¶жҖҒ */ } return 0;}зҠ¶жҖҒжңәеӨ„зҗҶ
иҝҷдёӘеҮҪж•°жҳҜж ёеҝғпјҢеҜ№з…§зқҖжіЁйҮҠе’Ңеӯ—иҠӮзҡ„йҳ¶ж®өеҚіеҸҜпјҢдёҚеҶҚиөҳиҝ°
е’ҢеҸ‘йҖҒжөҒзЁӢе·®дёҚеӨҡ
void io_uart_rx_handle(void* p){ uint8_t bit = 0; uint8_t parity = 0; io_uart_rx_dev_st* dev = (io_uart_rx_dev_st*)p; /* еҸӮж•°жЈҖжҹҘ */ if(dev == 0) { return; } switch(dev->state) { case IO_UART_RX_STATE_DATA: dev->time_set_period(dev->baud,io_uart_rx_handle); /* и®ҫзҪ®дёҖдёӘдҪҚе®Ҫзҡ„е‘Ёжңҹ,е‘ЁжңҹеҲ°дәҶеӣһи°ғio_uart_rx_handle */ dev->time_ctrl(1);
/* жӣҙж–°дёҖдҪҚпјҢдҪҺдҪҚеңЁеүҚ,жүҖд»Ҙе…Ҳж”ҫеңЁй«ҳдҪҚ然еҗҺеҫҖдҪҺдҪҚ移еҠЁ */ bit = dev->rx_rd(); dev->data >>= 1; /* иҝҷйҮҢиҰҒе…Ҳ移еҠЁеҗҺжӣҙж–°ж•°жҚ®,еӣ дёәжң¬ж¬ЎжңҖеҗҺжӣҙж–°зҡ„жҳҜжңүж•Ҳж•°жҚ® */ if(bit != 0) { dev->data |= 0x80; } dev->cal_parity ^= bit; dev->state_s++; if(dev->state_s >= dev->data_len) /* state_sе…ҲеҠ ,еӣ дёәиҝӣжқҘдёҖж¬Ўе°ұжҳҜ收еҲ°дёҖдёӘbitж•°жҚ® */ { if(dev->parity == IO_UART_RX_PARITY_NONE) { /* иҝҷйҮҢе°ұејҖе§Ӣзӯүеҫ…еҒңжӯўдҪҚ */ dev->state = IO_UART_RX_STATE_STOP; dev->state_s = 0; /**< еҒңжӯўдҪҚиҰҒз”ЁеҲ°state_sи®Ўж•°еҒңжӯўдҪҚж•°йңҖиҰҒжё…0 */ } else { /* иҝҷйҮҢе°ұйңҖиҰҒејҖе§Ӣзӯүеҫ…ж ЎйӘҢдҪҚ */ dev->state = IO_UART_RX_STATE_PARITY; } } else { /* дёҚж”№еҸҳзҠ¶жҖҒ继з»ӯдёӢдёҖдҪҚ */ } break; case IO_UART_RX_STATE_PARITY: /* ж ЎйӘҢдҪҚж—¶й—ҙеҲ°,иҝӣе…ҘеҒңжӯўдҪҚйҳ¶ж®ө иҝҷйҮҢе°ұйңҖиҰҒејҖе§ӢеҸ‘йҖҒеҒңжӯўдҪҚ */ dev->time_set_period(dev->baud,io_uart_rx_handle); /* и®ҫзҪ®дёҖдёӘдҪҚе®Ҫзҡ„е‘Ёжңҹ,е‘ЁжңҹеҲ°дәҶеӣһи°ғio_uart_rx_handle */ dev->time_ctrl(1);
switch (dev->parity) { case IO_UART_RX_PARITY_ODD: parity = dev->cal_parity ^ 0x01; break; case IO_UART_RX_PARITY_EVEN: parity = dev->cal_parity; break; case IO_UART_RX_PARITY_0: parity = 0; break; case IO_UART_RX_PARITY_1: parity = 1; break; default: break; }
bit = dev->rx_rd(); if(parity != bit) { /* ж ЎйӘҢй”ҷиҜҜеӨ„зҗҶ */ }
dev->state = IO_UART_RX_STATE_STOP; dev->state_s = 0; /**< еҒңжӯўдҪҚиҰҒз”ЁеҲ°sstate_sи®Ўж•°еҒңжӯўдҪҚж•°йңҖиҰҒжё…0 */ break; case IO_UART_RX_STATE_STOP: dev->state_s++; /* иҝӣе…ҘиҝҷйҮҢе®һйҷ…е°ұе·Із»ҸжҺҘ收дәҶдёҖдёӘеҒңжӯўдҪҚдәҶпјҢжүҖд»ҘжҳҜе…ҲеҠ */ if(dev->state_s >= dev->stop) { /* е®ҢжҲҗдёҖдёӘеӯ—иҠӮзҡ„жҺҘ收 */ dev->rx_cb(dev->data); dev->set_int(1,io_uart_rx_start); /* 继з»ӯдёӢдёҖдёӘеӯ—иҠӮжҺҘ收еӨ„зҗҶ */ dev->state = IO_UART_RX_STATE_IDLE; } else { dev->time_set_period(dev->baud,io_uart_rx_handle); /* и®ҫзҪ®дёҖдёӘдҪҚе®Ҫзҡ„е‘Ёжңҹ,е‘ЁжңҹеҲ°дәҶеӣһи°ғio_uart_tx_handle */ /* дёҚж”№еҸҳзҠ¶жҖҒ继з»ӯдёӢдёӘеҒңжӯўдҪҚ */ dev->time_ctrl(1); } break; }}移жӨҚ
移жӨҚеҚіе®һзҺ°ж•°жҚ®з»“жһ„дёӯзҡ„жҺҘеҸЈдҫқиө–пјҢеҚідёӢйқўзҡ„жҺҘеҸЈеҮҪж•°
static io_uart_rx_dev_st uart_rx_dev={ .parity = IO_UART_RX_PARITY_ODD, .stop = 2, .data_len=8, .baud = 115200,
.rx_rd = port_rx_rd, .init = port_rx_init, .deinit = port_rx_deinit, .time_set_period = port_time1_set_period, .rx_cb = rx_done_cb, .time_ctrl = port_timer1_ctrl, .set_int = port_set_int,};иҝҷйҮҢеҹәдәҺHPM53xxејҖеҸ‘жқҝе®һзҺ°пјҢд»Јз ҒеҰӮдёӢ
Uart_rx_port.c
static void port_timer1_cb(void);static void port_time1_set_period(uint32_t period, void(*cb)(void*));static void port_set_int(uint8_t enable, void(*)(void*));static void port_rx_init(void);static void port_rx_deinit(void);static uint8_t port_rx_rd(void);static void port_timer1_ctrl(uint8_t onoff);static void(*t1_cb)(void*) = 0;static void(*int_cb)(void*) = 0;static void rx_done_cb(uint8_t val);static void (*rx_cb)(uint8_t val) = 0;static io_uart_rx_dev_st uart_rx_dev={ .parity = IO_UART_RX_PARITY_ODD, .stop = 2, .data_len=8, .baud = 115200,
.rx_rd = port_rx_rd, .init = port_rx_init, .deinit = port_rx_deinit, .time_set_period = port_time1_set_period, .rx_cb = rx_done_cb, .time_ctrl = port_timer1_ctrl, .set_int = port_set_int,};
static void port_set_int(uint8_t enable, void(*cb)(void*)){ int_cb = cb; if(enable != 0) { HPM_GPIO0->PL[GPIO_DI_GPIOA].SET = (1u << 26); /* дҪҺз”өе№іжҲ–иҖ…дёӢйҷҚжІҝдёӯж–ӯ */ HPM_GPIO0->TP[GPIO_DI_GPIOA].SET = (1u << 26); /* иҫ№жІҝдёӯж–ӯ */ HPM_GPIO0->IF[GPIO_DI_GPIOA].VALUE = (1u << 26); /* еҶҷ1жё…йҷӨж Үеҝ— */ HPM_GPIO0->IE[GPIO_DI_GPIOA].SET = (1u << 26); /* еҶҷ1дҪҝиғҪдёӯж–ӯ */ } else { HPM_GPIO0->IE[GPIO_DI_GPIOA].CLEAR = (1u << 26); /* еҶҷ1дёҚдҪҝиғҪдёӯж–ӯ */ }}
static void port_timer1_cb(void){ HPM_GPTMR1->SR = 0x1; /* еҶҷ1жё…йҷӨж Үеҝ— */ if(t1_cb != 0) { t1_cb(&uart_rx_dev); }}
static void port_int_cb(void){ HPM_GPIO0->IF[GPIO_DI_GPIOA].VALUE = (1u << 26); /* еҶҷ1жё…йҷӨж Үеҝ— */ if(int_cb) { int_cb(&uart_rx_dev); }}
static void port_time1_set_period(uint32_t baud, void(*cb)(void*)){ t1_cb = cb; HPM_GPTMR1->CHANNEL[0].CR &= ~(1u << 10); /* еҒңжӯў */ HPM_GPTMR1->CHANNEL[0].CR |= (1u << 14); /* еӨҚдҪҚ */ HPM_GPTMR1->CHANNEL[0].CR &= ~(1u << 14); /* йҮҠж”ҫеӨҚдҪҚ */
HPM_GPTMR1->CHANNEL[0].CR |= (1u << 3); /* и°ғиҜ•ж—¶е®ҡж—¶еҷЁеҒңжӯў */
HPM_GPTMR1->CHANNEL[0].RLD = (81000000/baud); /* йҮҚиҪҪеҖј и®Ўж•°еҷЁд»Һ0ејҖе§ӢиҝҗиЎҢеҲ°йҮҚиҪҪеҖјжҒўеӨҚеҲ°0йҮҚж–°и®Ўж•° 1nSеҜ№еә”1/10дёӘи®Ўж•°еҖј з”ұдәҺиҪҜ件жү§иЎҢйңҖиҰҒж—¶й—ҙжүҖд»ҘиҝҷйҮҢзҡ„еҖјиҰҒе°ҸдёҖзӮ№ */
HPM_GPTMR1->SR = 0x1; /* еҶҷ1жё…йҷӨж Үеҝ— */
HPM_GPTMR1->IRQEN |= 0x01; /* йҖҡйҒ“0йҮҚиҪҪдёӯж–ӯдҪҝиғҪ */
}
static void port_rx_init(void){ HPM_IOC->PAD[IOC_PAD_PA26].FUNC_CTL = IOC_PA26_FUNC_CTL_GPIO_A_26; HPM_GPIO0->OE[GPIO_DI_GPIOA].CLEAR = 1u << 26;
install_isr(IRQn_GPTMR1,(uint32_t)port_timer1_cb); intc_m_enable_irq(IRQn_GPTMR1);
install_isr(IRQn_GPIO0_A,(uint32_t)port_int_cb); intc_m_enable_irq(IRQn_GPIO0_A);}
static void port_rx_deinit(void){ //uninstall_isr(IRQn_GPTMR1); intc_m_disable_irq(IRQn_GPTMR1); HPM_GPIO0->IE[GPIO_DI_GPIOA].CLEAR = (1u << 26); /* еҶҷ1дёҚдҪҝиғҪдёӯж–ӯ */}
static uint8_t port_rx_rd(void){ if((HPM_GPIO0->DI[GPIO_DI_GPIOA].VALUE & (1u << 26)) != 0) { return 1; } else { return 0; }}
static void port_timer1_ctrl(uint8_t onoff){ if(onoff) { HPM_GPTMR1->CHANNEL[0].CR |= (1u << 10); /* дҪҝиғҪ */ } else { HPM_GPTMR1->CHANNEL[0].CR &= ~(1u << 10); /* еҒңжӯў */ }}
static void rx_done_cb(uint8_t val){ rx_cb(val);}
void sw_uart_rx_init(void){ io_uart_rx_init(&uart_rx_dev);}
void sw_uart_rx_deinit(void){ io_uart_rx_deinit(&uart_rx_dev);}
void sw_uart_rx_start(uint8_t ctrl,void(*cb)(uint8_t val)){ rx_cb = cb; io_uart_rx_ctrl(&uart_rx_dev,ctrl);}
Uart_rx_port.h
extern "C"{
void sw_uart_rx_init(void);void sw_uart_rx_deinit(void);void sw_uart_rx_start(uint8_t ctrl,void(*cb)(uint8_t val));
}
жөӢиҜ•
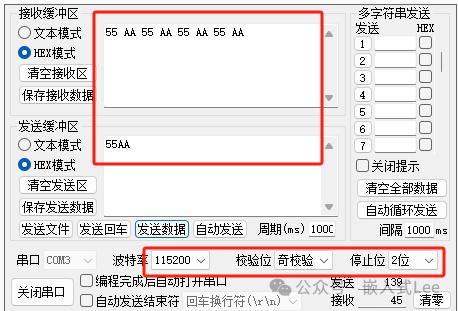
й…ҚзҪ®еҸӮж•°дёә115200-8-ODD-2
static io_uart_tx_dev_st uart_tx_dev={ .parity = IO_UART_TX_PARITY_ODD, .stop = 2, .data_len=8, .baud = 115200,
.tx_wr = port_tx_wr, .init = port_tx_init, .deinit = port_tx_deinit, .time_set_period = port_time0_set_period, .tx_cb =tx_done_cb, .time_ctrl = port_timer0_ctrl,};
static io_uart_rx_dev_st uart_rx_dev={ .parity = IO_UART_RX_PARITY_ODD, .stop = 2, .data_len=8, .baud = 115200,
.rx_rd = port_rx_rd, .init = port_rx_init, .deinit = port_rx_deinit, .time_set_period = port_time1_set_period, .rx_cb = rx_done_cb, .time_ctrl = port_timer1_ctrl, .set_int = port_set_int,};жөӢиҜ•д»Јз ҒеҰӮдёӢпјҢ收еҲ°ж•°жҚ®еҺҹж ·иҝ”еӣһгҖӮ
uint8_t str[]={0xAA,0xAA};
volatile int rx_flag = 0;void rx_cb(uint8_t val){ str[0]= val; rx_flag = 1;}void thread_entry(void *arg){ sw_uart_tx_init(); sw_uart_rx_init(); sw_uart_rx_start(1,rx_cb); while(1){ if(rx_flag) { rx_flag = 0; sw_uart_tx_byte(str[0]); } } sw_uart_tx_deinit(); sw_uart_rx_deinit();}
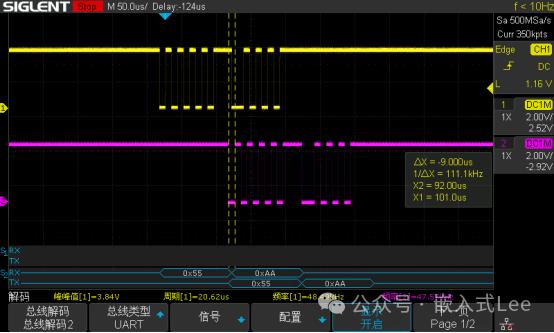
дҪҝз”ЁдёІеҸЈи°ғиҜ•еҠ©жүӢеҸ‘йҖҒпјҢејҖеҸ‘жқҝиҝ”еӣһпјҢзңӢеҲ°е®Ңе…ЁжӯЈзЎ®гҖӮдҪҝз”ЁзӨәжіўеҷЁдә§зңӢжіўеҪўд№ҹе®Ңе…ЁжӯЈзЎ®гҖӮ
жҖ»з»“
д»ҘдёҠи¶…зә§з®ҖеҚ•зҡ„д»Јз Ғе®һзҺ°дәҶдёІеҸЈж•°жҚ®зҡ„жҺҘ收пјҢе…·еӨҮиүҜеҘҪзҡ„еҸҜ移жӨҚжҖ§пјҢиҝҷж ·жҲ‘们е°ұе®ҢжҲҗдәҶIOжЁЎжӢҹдёІеҸЈзҡ„е…ЁйғЁе®һзҺ°гҖӮдҪҶжҳҜиҝҷиҝҳдёҚеӨҹпјҢд»ҘдёҠзӨәдҫӢд»Јз Ғд»…дҪңжөӢиҜ•пјҢ并дёҚйҖӮеҗҲе®һйҷ…еә”з”ЁгҖӮеңЁе®һйҷ…еә”з”ЁдёӯпјҢжҲ‘们иҝҳеҸҜд»Ҙ继з»ӯеҹәдәҺдёҠйқўдёҖзҜҮзҡ„FIFOе®һзҺ°пјҢе®һзҺ°еҹәдәҺзҺҜеҪўзј“еҶІеҢәзҡ„дёІеҸЈж”¶еҸ‘й©ұеҠЁ,иҝҷж ·жүҚиғҪе®һзҺ°й«ҳж•Ҳж–№дҫҝеә”з”Ёи°ғз”Ёзҡ„жҺҘеҸЈпјҢи§ҒдёӢдёҖзҜҮгҖӮ