дЄА. еЇФзФ® SPIFLASHзКґжАБеѓДе≠ШеЩ®зЪДиѓїеЖЩ
дї•дЄКеЃЮзО∞дЇЖIOж®°жЛЯSPIжО•еП£пЉМжХідЄ™ињЗз®ЛеЊИиЗ™зДґпЉМеПВиАГжЧґеЇПеЫЊжУНдљЬIOеН≥еПѓгАВжШѓй™°е≠РжШѓй©ђжЛЙеЗЇжЭ•йБЫйБЫгАВйВ£дєИжИСдїђе∞±зїІзї≠еЯЇдЇОж≠§жЭ•ињЫи°МSPIFALSHзЪДжУНдљЬпЉМдї•W25Q32FVдЄЇдЊЛпЉМеЕИеЃЮзО∞зКґжАБеѓДе≠ШеЩ®зЪДиѓїеЖЩпЉМзДґеРОеЖНеЃЮзО∞FLASHзЪДиѓїеЖЩеЃЮзО∞FLASHзЉЦиЊСеЩ®зЪДеЈ•еЕЈгАВ
W25Q32FVжЙЛеЖМеПВиАГгАКhttps://www.winbond.com/hq/product/code-storage-flash-memory/serial-nor-flash/?__locale=en&partNo=W25Q32FVгАЛ
4.1 W25Q32FVзЪДзКґжАБеѓДе≠ШеЩ®
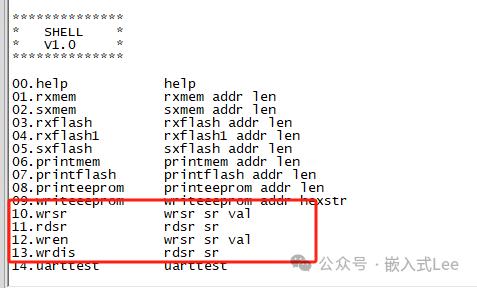
жИСдїђеЕИдїОжЙЛеЖМжЙЊеИ∞еѓєеЇФзЪДжМЗдї§и°®
жЬЙ3дЄ™зКґжАБеѓДе≠ШеЩ®еИЖеИЂйГљжЬЙеѓєеЇФзЪДиѓїеЖЩжМЗдї§гАВ
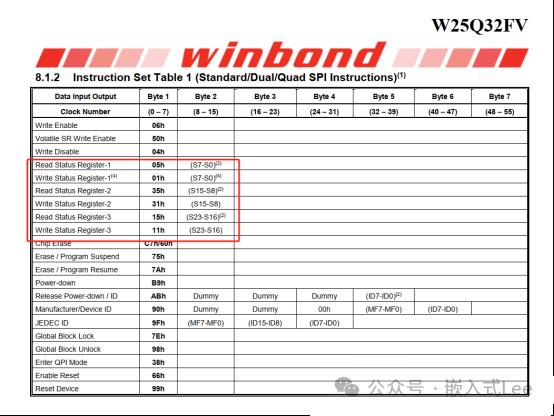
еЬ®еЃЮзО∞жЧґжИСдїђеПѓдї•еѓєеЇФзЪДжХ∞зїДйАЪињЗ糥еЉХжЭ•еМєйЕНеСљдї§
const uint8_t s_cmd_rd_sr[3]={CMD_RD_SR1,CMD_RD_SR2,CMD_RD_SR3};
const uint8_t s_cmd_wr_sr[3]={CMD_WR_SR1,CMD_WR_SR2,CMD_WR_SR3};зДґеРОжЯ•зЬЛеЕЈдљУеСљдї§зЪДжЧґеЇПеЫЊ
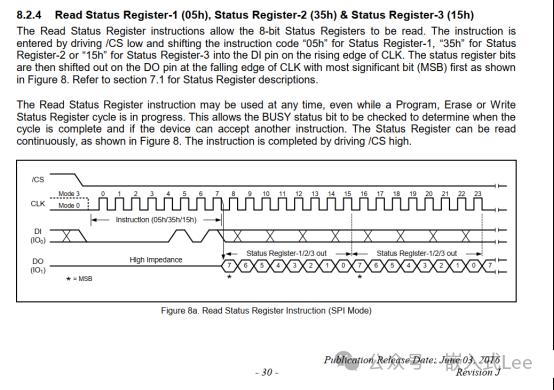
жИСдїђзЬЛеИ∞иѓїеѓДе≠ШеЩ®еЊИзЃАеНХпЉМжЛЙдљОCSеПСйАБжМЗдї§е≠ЧиКВпЉМдЄЛдЄАдЄ™е≠ЧиКВе∞±жШѓињФеЫЮзЪДеѓДе≠ШеЩ®еАЉгАВжМБзї≠зїЩSCKеТМдњЭжМБCSдљОеИЩйЗНе§НиЊУеЗЇеѓДе≠ШеЩ®еАЉгАВ
еЖЩеѓДе≠ШеЩ®пЉМдєЯеЊИзЃАеНХпЉМжЛЙдљОCSеЕИеПСеСљдї§е≠ЧиКВпЉМзДґеРОеПСжХ∞жНЃе≠ЧиКВпЉМжЛЙйЂШCSеН≥еПѓгАВ
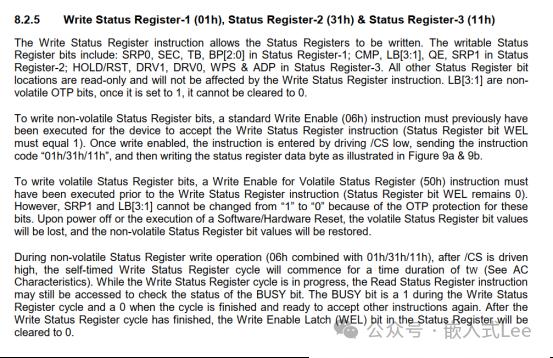
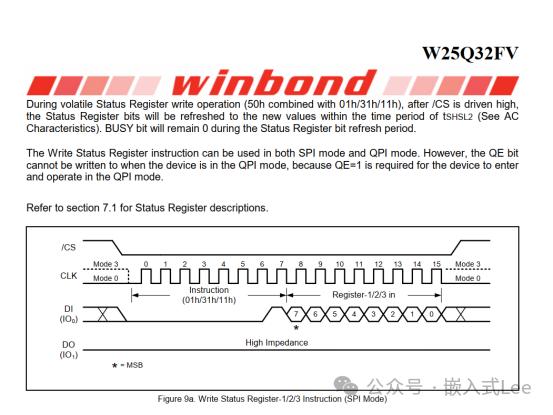
зДґеРОжИСдїђеЖНжЭ•зЬЛзКґжАБеѓДе≠ШеЩ®еАЉзЪДеРЂдєЙ
зКґжАБеѓДе≠ШеЩ®0,йЂШ6дљНеѓєеЇФдњЭжК§дљНпЉМWELжШѓеЖЩдљњиГљзКґжАБпЉМBUSYжШѓжШѓеР¶ж≠£еЬ®жУНдљЬењЩзКґжАБпЉМињЩдЄ§дљНжѓФиЊГйЗНи¶БгАВдЄАиИђжУНдљЬеЃМи¶Бж£АжЯ•BUSYжШѓеР¶дЄЇ0жЙНиГљзїІзї≠пЉМеЖЩдєЛеЙНи¶БеИ§жЦ≠WELжШѓеР¶дЄЇ1еПѓеЖЩгАВ
иѓ•еѓДе≠ШеЩ®еАЉйїШиЃ§еАЉдЄЇ0.

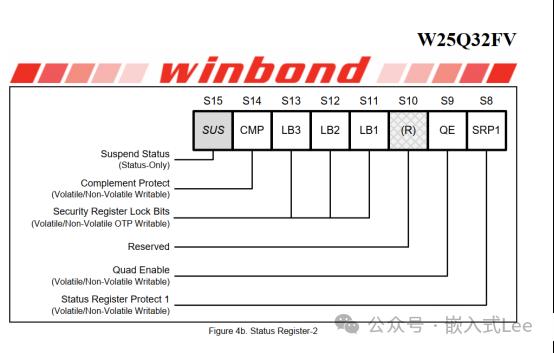
зКґжАБеѓДе≠ШеЩ®2
иѓ•еѓДе≠ШеЩ®йїШиЃ§еАЉдєЯжШѓ0пЉМеЕЈдљУеРЂдєЙеПВиАГжЙЛеЖМгАВ
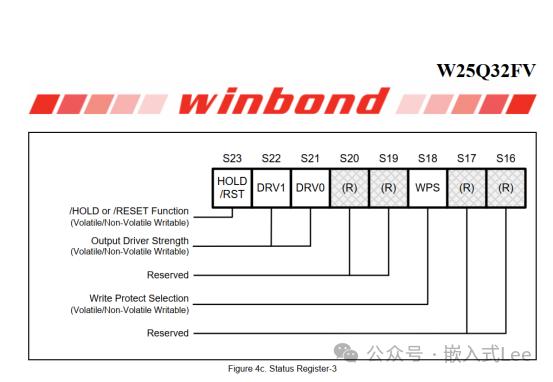
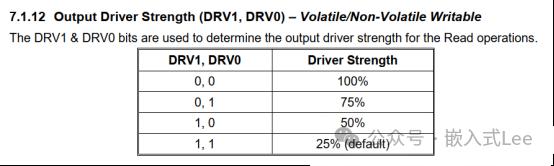
зКґжАБеѓДе≠ШеЩ®3пЉМиѓ•еѓДе≠ШеЩ®йїШиЃ§еАЉ0x60.
еН≥DRV1еТМDRV0йГљжШѓ1
4.2 W25Q32FVзЪДзКґжАБеѓДе≠ШеЩ®зЪДиѓїеЖЩй©±еК®
дї•дЄКдїОжЙЛеЖМдЇЖиІ£зКґжАБеѓДе≠ШеЩ®зЪДиґ≥е§Яе§ЪзЪДдњ°жБѓпЉМдЇОжШѓе∞±еПѓдї•еЉАеІЛеЖЩдї£з†БдЇЖгАВ
жИСдїђињШжШѓйЭҐеРСеѓєи±°пЉМиАГиЩСеПѓзІїж§НжАІгАВ
W25Q32FV.hзІН
еЕИжКљи±°еѓєSPIжО•еП£зЪДдЊЭиµЦпЉМиЃЊиЃ°иЃЊе§Зз±їзїУжЮДдљУ
typedef void (*w25qxx_spi_enable_pf)(void); /**< SPIжО•еП£дљњиГљ */
typedef void (*w25qxx_spi_disable_pf)(void); /**< SPIжО•еП£з¶БиГљ */
typedef int (*w25qxx_spi_trans_pf)(uint8_t* tx, uint8_t* rx, uint32_t size); /**< SPIиѓїеЖЩжО•еП£ */
typedef void (*w25qxx_spi_init_pf)(void); /**< еИЭеІЛеМЦжО•еП£ */
typedef void (*w25qxx_spi_deinit_pf)(void); /**< иІ£йЩ§еИЭеІЛеМЦжО•еП£ */
/**
* \struct w25qxx_dev_st
* жО•еП£зїУжЮДдљУ
*/
typedef struct
{
w25qxx_spi_enable_pf enable; /**< SPIжО•еП£дљњиГљ */
w25qxx_spi_disable_pf disbale; /**< SPIжО•еП£з¶БиГљ */
w25qxx_spi_trans_pf trans; /**< SPIиѓїеЖЩжО•еП£ */
w25qxx_spi_init_pf init; /**< еИЭеІЛеМЦжО•еП£ */
w25qxx_spi_deinit_pf deinit; /**< иІ£йЩ§еИЭеІЛеМЦжО•еП£ */
uint8_t* buffer; /**< зЉУе≠ШеЬ∞еЭА */
} w25qxx_dev_st;зДґеРОз°ЃиЃ§жО•еП£
/**
* \fn w25qxx_init
* еИЭеІЛеМЦ
* \param[in] dev \ref w25qxx_dev_st
*/
void w25qxx_init(w25qxx_dev_st* dev);
/**
* \fn w25qxx_deinit
* иІ£йЩ§еИЭеІЛеМЦ
* \param[in] dev \ref w25qxx_dev_st
*/
void w25qxx_deinit(w25qxx_dev_st* dev);
/**
* \fn w25qxx_rd_sr
* иѓїзКґжАБеѓДе≠ШеЩ®
* \param[in] dev \ref w25qxx_dev_st
* \param[in] sr зКґжАБеѓДе≠ШеЩ®еЇПеПЈ0~2
* \param[out] val е≠ШеВ®иѓїеИ∞зЪДеАЉ
* \return еПВиАГw25qxx_spi_trans_pfзЪДињФеЫЮеАЉ
*/
int w25qxx_rd_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t* val);
/**
* \fn w25qxx_wr_sr
* еЖЩзКґжАБеѓДе≠ШеЩ®
* \param[in] dev \ref w25qxx_dev_st
* \param[in] sr зКґжАБеѓДе≠ШеЩ®еЇПеПЈ0~2
* \param[in] val еЊЕеЖЩеЕ•зЪДеАЉ
* \return еПВиАГw25qxx_spi_trans_pfзЪДињФеЫЮеАЉ
*/
int w25qxx_wr_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t val);
/**
* \fn w25qxx_wr_enable
* еЖЩдљњиГљ
* \param[in] dev \ref w25qxx_dev_st
* \return еПВиАГw25qxx_spi_trans_pfзЪДињФеЫЮеАЉ
*/
int w25qxx_wr_enable(w25qxx_dev_st* dev);
/**
* \fn w25qxx_wr_disable
* еЖЩз¶Бж≠Ґ
* \param[in] dev \ref w25qxx_dev_st
* \return еПВиАГw25qxx_spi_trans_pfзЪДињФеЫЮеАЉ
*/
int w25qxx_wr_disable(w25qxx_dev_st* dev);жЬАеРОе∞±жШѓеЃЮзО∞жО•еП£пЉМW25Q32FV.cдЄ≠
еСљдї§еЃЪдєЙеТМеИЭеІЛеМЦиІ£йЩ§еИЭеІЛеМЦеЃЮзО∞
const uint8_t s_cmd_rd_sr[3]={CMD_RD_SR1,CMD_RD_SR2,CMD_RD_SR3};
const uint8_t s_cmd_wr_sr[3]={CMD_WR_SR1,CMD_WR_SR2,CMD_WR_SR3};
void w25qxx_init(w25qxx_dev_st* dev){
dev->init();
}
/**
* \fn w25qxx_deinit
* иІ£йЩ§еИЭеІЛеМЦ
* \param[in] dev \ref w25qxx_dev_st
*/
void w25qxx_deinit(w25qxx_dev_st* dev){
dev->deinit();
}иѓїзКґжАБеѓДе≠ШеЩ®
/**
* \fn w25qxx_rd_sr
* иѓїзКґжАБеѓДе≠ШеЩ®
* \param[in] dev \ref w25qxx_dev_st
* \param[in] sr зКґжАБеѓДе≠ШеЩ®еЇПеПЈ0~2
* \param[out] val е≠ШеВ®иѓїеИ∞зЪДеАЉ
* \return еПВиАГw25qxx_spi_trans_pfзЪДињФеЫЮеАЉ
*/
int w25qxx_rd_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t* val){
int res;
uint8_t tx[2];
uint8_t rx[2];
if((dev == 0) || (val == 0))
{
return -1;
}
if(sr >= sizeof(s_cmd_rd_sr)/sizeof(s_cmd_rd_sr[0]))
{
return -1;
}
tx[0]=s_cmd_rd_sr[sr];
tx[1]=0xFF;
dev->enable();
res = dev->trans(tx,rx,2);
dev->disbale();
*val = rx[1];
return res;
}еЖЩзКґжАБеѓДе≠ШеЩ®
/**
* \fn w25qxx_wr_sr
* еЖЩзКґжАБеѓДе≠ШеЩ®
* \param[in] dev \ref w25qxx_dev_st
* \param[in] sr зКґжАБеѓДе≠ШеЩ®еЇПеПЈ0~2
* \param[in] val еЊЕеЖЩеЕ•зЪДеАЉ
* \return еПВиАГw25qxx_spi_trans_pfзЪДињФеЫЮеАЉ
*/
int w25qxx_wr_sr(w25qxx_dev_st* dev, uint8_t sr, uint8_t val){
int res;
uint8_t tx[2];
if((dev == 0) || (val == 0))
{
return -1;
}
if(sr >= sizeof(s_cmd_wr_sr)/sizeof(s_cmd_wr_sr[0]))
{
return -1;
}
tx[0]=s_cmd_wr_sr[sr];
tx[1]=val;
dev->enable();
res = dev->trans(tx,0,2);
dev->disbale();
return res;
}еЖЩдљњиГљеТМз¶Бж≠Ґ
int w25qxx_wr_enable(w25qxx_dev_st* dev){
int res;
uint8_t tx[1];
if(dev == 0)
{
return -1;
}
tx[0]=CMD_WR_EN;
dev->enable();
res = dev->trans(tx,0,1);
dev->disbale();
return res;
}
int w25qxx_wr_disable(w25qxx_dev_st* dev){
int res;
uint8_t tx[1];
if(dev == 0)
{
return -1;
}
tx[0]=CMD_WR_DIS;
dev->enable();
res = dev->trans(tx,0,1);
dev->disbale();
return res;
}еПѓдї•зЬЛеИ∞еЃЮзО∞йЭЮеЄЄзЃАеНХпЉМеЕЈе§ЗйЂШеПѓзІїж§НжАІгАВ
4.3 жµЛиѓХ
жИСдїђињШжШѓеЯЇдЇОдєЛеЙНзЪДеСљдї§и°МеЃЮзО∞пЉМжЭ•жЈїеК†еСљдї§ињЫи°МжµЛиѓХ
shell_func.cдЄ≠
зФ≥жШОеЃЮзО∞еЗљжХ∞пЉМg_shell_cmd_list_astдЄ≠жЈїеК†еСљдї§
static void wrsrfunc(uint8_t* param);
static void rdsrfunc(uint8_t* param);
static void wrenfunc(uint8_t* param);
static void wrdisfunc(uint8_t* param);
{ (uint8_t*)"wrsr", wrsrfunc, (uint8_t*)"wrsr sr val"},
{ (uint8_t*)"rdsr", rdsrfunc, (uint8_t*)"rdsr sr"},
{ (uint8_t*)"wren", wrenfunc, (uint8_t*)"wren"},
{ (uint8_t*)"wrdis", wrdisfunc, (uint8_t*)"wrdis"},еЃЮзО∞IOжУНдљЬжО•еП£еТМиЃЊе§ЗеЃЮдЊЛ
static void io_spi_port_init(void)
{
}
static void io_spi_port_deinit(void)
{
}
static void io_spi_port_cs_write(uint8_t val)
}
static void io_spi_port_sck_write(uint8_t val)
{
}
static void io_spi_port_mosi_write(uint8_t val)
{
}
static uint8_t io_spi_port_miso_read(void)
{
}
static void io_spi_port_delay(uint32_t delay)
{
}
static io_spi_dev_st io_spi_dev=
{
.cs_write = io_spi_port_cs_write,
.deinit = io_spi_port_deinit,
.delay_pf = io_spi_port_delay,
.delayns = 100,
.init = io_spi_port_init,
.miso_read = io_spi_port_miso_read,
.mode = 3,
.mosi_write = io_spi_port_mosi_write,
.msb = 1,
.sck_write = io_spi_port_sck_write,
};еЃЮзО∞flashдЊЭиµЦзЪДжО•еП£еТМиЃЊе§ЗеЃЮдЊЛ
static void w25qxx_port_enable(void){
io_spi_enable(&io_spi_dev);
}
static void w25qxx_port_disable(void){
io_spi_disable(&io_spi_dev);
}
static int w25qxx_port_trans(uint8_t* tx, uint8_t* rx, uint32_t size){
return io_spi_trans(&io_spi_dev, tx, rx, size);
}
static void w25qxx_port_init(void){
io_spi_init(&io_spi_dev);
}
static void w25qxx_port_deinit(void){
io_spi_deinit(&io_spi_dev);
}
static w25qxx_dev_st w25qxx_dev=
{
.deinit = w25qxx_port_deinit,
.disbale = w25qxx_port_disable,
.enable = w25qxx_port_enable,
.init = w25qxx_port_init,
.trans = w25qxx_port_trans,
};еЃЮзО∞еЖЩеСљдї§
void wrsrfunc(uint8_t* param){
uint32_t sr;
uint32_t val;
uint8_t* p = param;
while(1)
{
if((*p > 'z') || (*p < 'a'))
{
break;
}
else
{
p++;
}
}
while(1)
{
if(*p != ' ')
{
break;
}
else
{
p++;
}
}
sr = atoi((const char*)p);
while(1)
{
if((*p > '9') || (*p < '0'))
{
break;
}
else
{
p++;
}
}
while(1)
{
if(*p != ' ')
{
break;
}
else
{
p++;
}
}
val = atoi((const char*)p);
w25qxx_init(&w25qxx_dev);
w25qxx_wr_sr(&w25qxx_dev, sr, val);
w25qxx_deinit(&w25qxx_dev);
}еЃЮзО∞иѓїеСљдї§
void rdsrfunc(uint8_t* param){
uint32_t sr;
uint8_t val=0;
uint8_t* p = param;
while(1)
{
if((*p > 'z') || (*p < 'a'))
{
break;
}
else
{
p++;
}
}
while(1)
{
if(*p != ' ')
{
break;
}
else
{
p++;
}
}
sr = atoi((const char*)p);
w25qxx_init(&w25qxx_dev);
w25qxx_rd_sr(&w25qxx_dev, sr, &val);
w25qxx_deinit(&w25qxx_dev);
printf("val = %d\r\n",val);
}еЃЮзО∞дљњиГљз¶Бж≠ҐеСљдї§
void wrenfunc(uint8_t* param){
(void)param;
w25qxx_init(&w25qxx_dev);
w25qxx_wr_enable(&w25qxx_dev);
w25qxx_deinit(&w25qxx_dev);
}
void wrdisfunc(uint8_t* param){
(void)param;
w25qxx_init(&w25qxx_dev);
w25qxx_wr_disable(&w25qxx_dev);
w25qxx_deinit(&w25qxx_dev);
}ињЫеЕ•еСљдї§и°МhelpжЯ•зЬЛжЈїеК†зЪДеСљдї§
ж®°еЉП3жµЛиѓХ
еЖЩдљњиГљ/з¶БиГљжµЛиѓХ
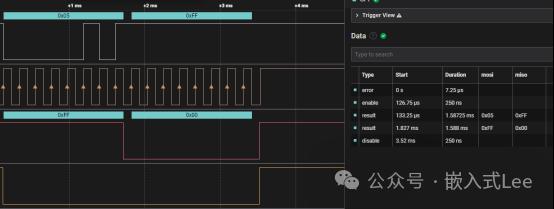
еЕИеЖЩдљњиГљиѓїеЗЇеѓДе≠ШеЩ®0еАЉдЄЇ1еН≥bit1=1 WEL=1
зДґеРОеЖЩз¶Бж≠ҐиѓїеЗЇеѓДе≠ШеЩ®0еПШдЄЇ0.
sh>
wren
rdsr 0
val = 2
wrdis
rdsr 0
val = 0
ж≥ҐељҐе¶ВдЄЛ



ж≥®жДПе¶ВжЮЬињЩйЗМи¶Бе∞ЖеѓДе≠ШеЩ®0жФєдЄЇ0ењЕй°їи¶Б
WrenдљњиГљпЉМзДґеРОwrsr 0 2еЖЩ2иАМдЄНжШѓеЖЩ0гАВ
sh>
rdsr 0
val = 252
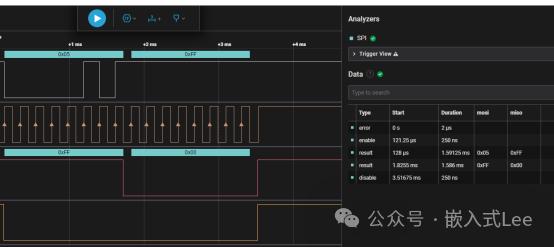
wrsr 0 2
rdsr 0
val = 252
wren
rdsr 0
val = 254 ж≠§жЧґеЈ≤зїПеЖЩдљњиГљдљЖжШѓwrsr 0 0дЄНиГљеЖЩ0
wrsr 0 0
rdsr 0
val = 254
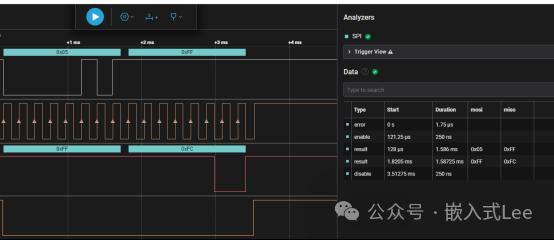
wrsr 0 2 wrsr 0 2еЖЩ2жЙНиГљеЖЩ0
rdsr
val = 0
еЖЩеѓДе≠ШеЩ®0
еЕИи¶БеЖЩдљњиГљ
wren
зДґеРОеЖЩ
wrsr 0 252
жЬАеРОиѓї
rdsr 0
sh>
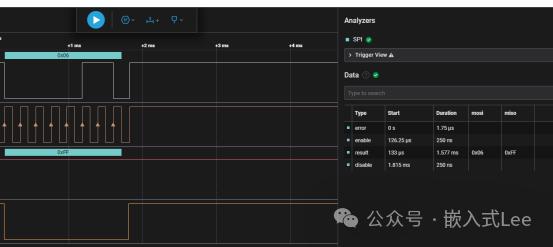
wren
wrsr 0 252
rdsr 0
val = 252
еПѓдї•зЬЛеИ∞еЫЮиѓїеАЉж≠£з°ЃгАВ
ж≥ҐељҐе¶ВдЄЛ

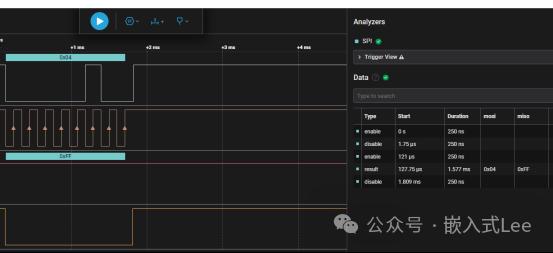
иѓїеѓДе≠ШеЩ®0
еСљдї§rdsr 0
sh>
rdsr 0
val = 0
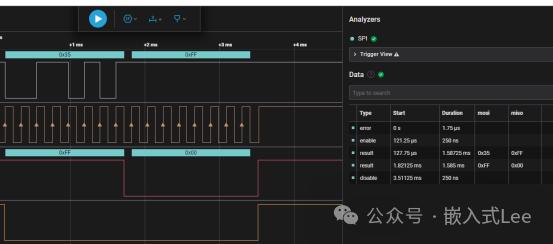
йАїиЊСеИЖжЮРдї™жКУеИ∞дњ°еПЈе¶ВдЄЛ

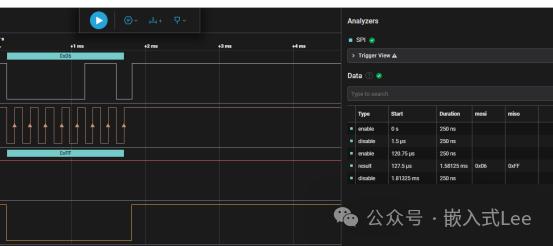
иѓїеѓДе≠ШеЩ®1
еСљдї§rdsr 1
sh>
rdsr 1
val = 0
йАїиЊСеИЖжЮРдї™жКУеИ∞дњ°еПЈе¶ВдЄЛ

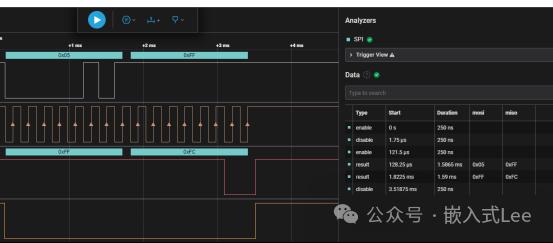
иѓїеѓДе≠ШеЩ®2
еСљдї§rdsr 2
sh>
rdsr 2
val = 96
йАїиЊСеИЖжЮРдї™жКУеИ∞дњ°еПЈе¶ВдЄЛ
ж®°еЉП0жµЛиѓХ
io_spi_devзЪД.modeжФєдЄЇ0
еЖЩдљњиГљ/з¶БиГљжµЛиѓХ
еЕИеЖЩдљњиГљиѓїеЗЇеѓДе≠ШеЩ®0еАЉдЄЇ1еН≥bit1=1 WEL=1
зДґеРОеЖЩз¶Бж≠ҐиѓїеЗЇеѓДе≠ШеЩ®0еПШдЄЇ0.
sh>
wren
rdsr 0
val = 2
wrdis
rdsr 0
val = 0
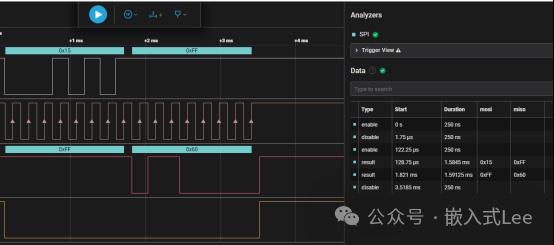
ж≥ҐељҐе¶ВдЄЛ


еЖЩеѓДе≠ШеЩ®0
еЕИи¶БеЖЩдљњиГљ
wren
зДґеРОеЖЩ
wrsr 0 252
жЬАеРОиѓї
rdsr 0
sh>
wren
wrsr 0 252
rdsr 0
val = 252
еПѓдї•зЬЛеИ∞еЫЮиѓїеАЉж≠£з°ЃгАВ
ж≥ҐељҐе¶ВдЄЛ

иѓїеѓДе≠ШеЩ®0
еСљдї§rdsr 0
sh>
rdsr 0
val = 0
йАїиЊСеИЖжЮРдї™жКУеИ∞дњ°еПЈе¶ВдЄЛ
еПѓиІБз©ЇйЧ≤жЧґSCKжШѓдљОпЉМжЬАеРОCSжЛЙйЂШеРОSCKдЄЇйЂШжШѓеЫ†дЄЇdeinitдЇЖпЉМioеЉХиДЪ襀йїШиЃ§жЛЙйЂШдЇЖпЉМcsдєЛеЙНз©ЇйЧ≤жШѓдљОзЪДгАВ
иѓїеѓДе≠ШеЩ®1
еСљдї§rdsr 1
sh>
rdsr 1
val = 0
йАїиЊСеИЖжЮРдї™жКУеИ∞дњ°еПЈе¶ВдЄЛ
иѓїеѓДе≠ШеЩ®2
еСљдї§rdsr 2
sh>
rdsr 2
val = 96
йАїиЊСеИЖжЮРдї™жКУеИ∞дњ°еПЈе¶ВдЄЛ
