车距、速度检测系统这个题目算是课程设计和毕业设计中常见的题目了,本期是一个基于51单片机的车速车距自动控制系统设计
需要的源文件和程序的小伙伴可以关注公众号【阿目分享嵌入式】,赞赏任意文章 2¥,私信阿目【416基于51单片机的车速车距自动控制系统】即可获取(看到消息会第一时间回复~)
仿真环境
proteus8.9
程序编译
keil4.60
功能
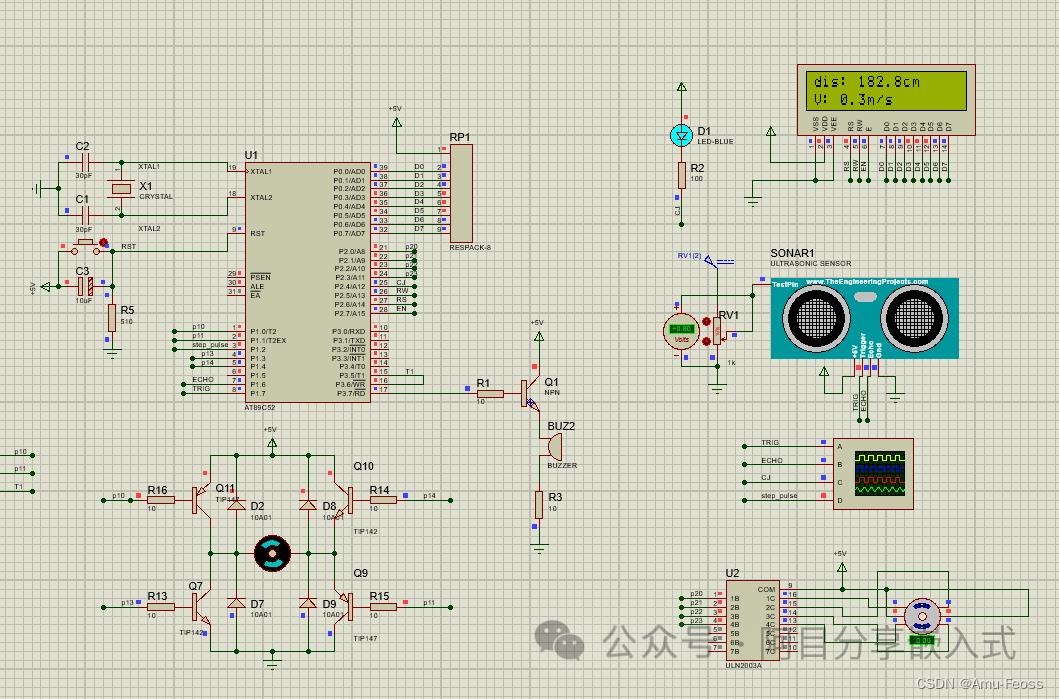
LCD1602显示速度和距离
模拟霍尔传感器检测
H桥电机控制电路
超声波模块控制
ULN2003步进电机控制模块
示波器截图
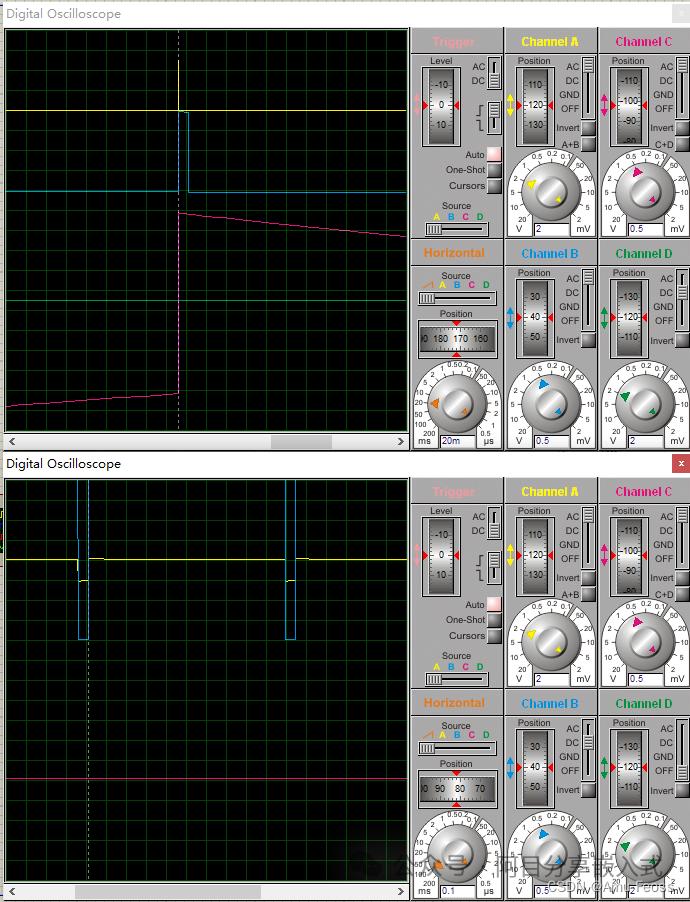
示波器显示了电机和超声波的控制信号
程序说明
电机在与障碍物的距离越远时,转速越快,测得的车速也越快
步进电机 在小车与障碍物的距离低于1.5M时 转动+45度或者 -45度,
目前设置的奇数次转弯是正+45,偶数次转弯是负45度
蜂鸣器会在 车距低于1.5M时 报警,报警时间2S,同时执行2.中的转弯
显示车速和 车距, 注意车速的测得是模拟的方波信号,
实际的霍尔传感器也是输出方波信号
转弯的车距 目前设置的1.5M,可在程序中更改
两个示波器,其中左边一个的黄色曲线和蓝色曲线显示了
电机控制的波形,粉红色曲线是霍尔传感器的方波输出;
右边一个显示的是 超声波传感器和步进电机的控制信号
需要的源文件和程序的小伙伴可以关注公众号【阿目分享嵌入式】,赞赏任意文章 2¥,私信阿目【416基于51单片机的车速车距自动控制系统】即可获取(看到消息会第一时间回复~)