д»ҠеӨ©зҡ„д»ҝзңҹеҲҶдә«жқҘе•ҰпјҒеҹәдәҺи¶…еЈ°жіўзҡ„жөӢи·қжөӢйҖҹзі»з»ҹи®ҫи®Ў~~йңҖиҰҒзЁӢеәҸе’Ңжәҗд»Јз Ғзҡ„е°ҸдјҷдјҙзӮ№дёҖжіўе…іжіЁеҗҺеҸ°еӣһеӨҚ вҖң004и¶…еЈ°жіўжөӢи·қжөӢйҖҹвҖқпјҢжңүй—®йўҳи®°еҫ—з§ҒдҝЎйҳҝзӣ®гҖӮ
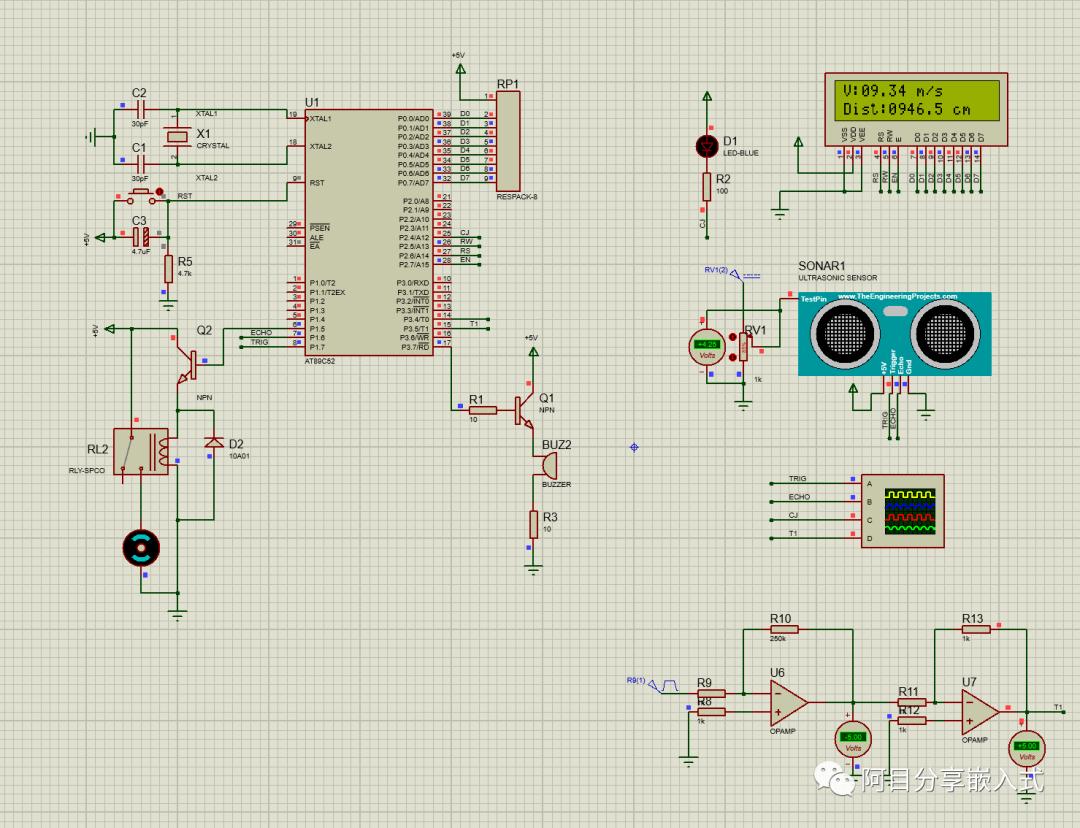
дё»иҰҒжЁЎеқ—HC-SR04и¶…еЈ°жіўжЁЎеқ—пјҢLCD12864жҳҫзӨәжЁЎеқ—пјҢйңҚе°”дј ж„ҹеҷЁжЈҖжөӢз”өи·ҜпјҢеҲ¶еҠЁз”өжңәжҺ§еҲ¶з”өи·Ҝе’ҢжҠҘиӯҰз”өи·ҜгҖӮproteusд»ҝзңҹз”өи·ҜеӣҫеҰӮдёӢпјҡ
д»Ӣз»ҚдёӢеҗ„дёӘйғЁеҲҶпјҢе…¶дёӯеҚ•зүҮжңәжңҖе°Ҹзі»з»ҹзңӢдёҠдёҖжңҹпјҢжң¬жңҹеҸӘд»Ӣз»ҚжІЎжңүд»Ӣз»ҚиҝҮзҡ„жЁЎеқ—пјҢи¶…еЈ°жіўжЁЎеқ—пјҡ
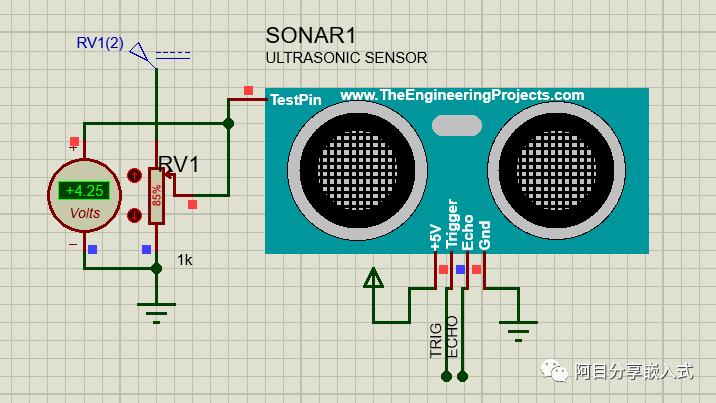
йңҖиҰҒжіЁж„Ҹзҡ„жҳҜпјҢд»ҝзңҹдёҚжҳҜзңҹе®һзҡ„е®һзү©пјҢжүҖд»Ҙд»ҝзңҹдёӯзҡ„и·қзҰ»и°ғиҠӮжҳҜдҪҝз”Ёе·Ұдҫ§зҡ„ж»‘еҠЁеҸҳйҳ»еҷЁдёҠзҡ„еҲҶеҺӢжқҘж”№еҸҳзҡ„пјҢеҚіз”өеҺӢж”№еҸҳжЁЎжӢҹи·қзҰ»ж”№еҸҳгҖӮ
и¶…еЈ°жіўзҡ„жөӢи·қжҖқи·Ҝпјҡ
еҚ•зүҮжңәжҺ§еҲ¶и¶…еЈ°жіўжЁЎеқ—зҡ„trigеј•и„ҡз»ҙжҢҒ10uSзҡ„й«ҳз”өе№іпјҢи¶…еЈ°жіўжЁЎеқ—дҫҝдјҡеҸ‘еҮәдёҖдёӘеЈ°жіўдҝЎеҸ·пјҢеңЁеЈ°жіўдҝЎеҸ·иҝ”еӣһж—¶пјҢи¶…еЈ°жіўжЁЎеқ—зҡ„echoеј•и„ҡдјҡиҫ“еҮәй«ҳз”өе№іпјҢзЁӢеәҸдёӯжөӢйҮҸй«ҳз”өе№ізҡ„ж—¶й—ҙTпјҢе°ұжҳҜеЈ°йҹіеҫҖиҝ”зҡ„дј ж’ӯж—¶й—ҙпјҢж №жҚ®еЈ°йҖҹд№ҳд»Ҙж—¶й—ҙе°ұжҳҜеҫҖиҝ”и·қзҰ»дәҶпјҢеҶҚйҷӨд»Ҙ2е°ұжҳҜеҚ•иҫ№и·қзҰ»гҖӮ
float MeasuringDistance(){
TH0=0; // е®ҡж—¶еҷЁд»Һ0ејҖе§Ӣи®Ўж—¶ TL0=0; Trig=1; //йңҚе°”дј ж„ҹеҷЁи§ҰеҸ‘дҝЎеҸ·жҢҒз»ӯ20us Delay20us(); Trig=0; //е…ій—ӯи§ҰеҸ‘дҝЎеҸ·
//зӯүеҫ…еӣһе“ҚдҝЎеҸ·еҸҳдҪҺз”өе№і while(!Echo); TR0=1; //еҗҜеҠЁе®ҡж—¶еҷЁ0 //зӯүеҫ…еӣһе“ҚдҝЎеҸ·еҸҳдҪҺз”өе№і while(Echo); TR0=0; //е…ій—ӯе®ҡж—¶еҷЁ0
//и®Ўз®—и·қзҰ»(mm) return (SPEEDSOUND*(TH0*256.0+TL0))/2000;}жіЁж„Ҹй…ҚзҪ®еҚ•зүҮжңәзҡ„е®ҡж—¶еҷЁпјҢжқҘжөӢйҮҸи¶…еЈ°жіўechoеј•и„ҡдёҠзҡ„й«ҳз”өе№іж—¶й—ҙгҖӮ
йңҚе°”дј ж„ҹеҷЁзҡ„жөӢйҖҹз”өи·Ҝпјҡ
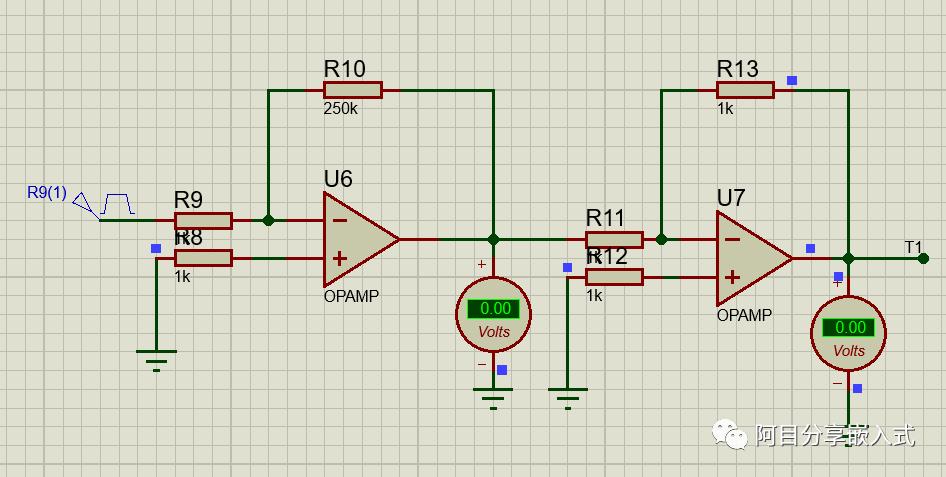
йңҚе°”дј ж„ҹеҷЁзҡ„иҫ“еҮәдёҖиҲ¬жҳҜдёҖдёӘеҫ®е°Ҹзҡ„з”өеҺӢдҝЎеҸ·пјҢжүҖд»ҘжӯӨз”өи·ҜзӮ№еҚҠйғЁеҲҶжҳҜдёҖдёӘиҙҹеҸҚйҰҲж”ҫеӨ§з”өи·ҜпјҢе°Ҷз”өеҺӢж”ҫеӨ§еҲ°5Vе·ҰеҸіпјҢеҶҚз»ҸиҝҮдёҖдёӘеҸҚзӣёеҷЁе°Ҷз”өеҺӢиҪ¬дёәжӯЈз”өеҺӢиҫ“е…ҘеҚ•зүҮжңәгҖӮдҪҝз”ЁеҚ•зүҮжңәзҡ„T1и®Ўж•°еҷЁеҜ№ж–№жіўдҝЎеҸ·иҝӣиЎҢи®Ўж•°пјҢдёҖдёӘж–№жіўи§ҰеҸ‘дёҖж¬Ўдёӯж–ӯпјҢи®Ўж•°еңЁдёӯж–ӯеҮҪж•°дёӯе®ҢжҲҗгҖӮйҖҹеәҰзҡ„и®Ўз®—е°ұжҳҜж №жҚ®йңҚе°”дј ж„ҹеҷЁзҡ„и„үеҶІж•°жқҘзҡ„пјҢжңүиҪҰиҪ®зҡ„е‘Ёй•ҝд»ҘеҸҠи„үеҶІж•°е’Ңж—¶й—ҙе°ұеҸҜд»Ҙз®—жөӢйҖҹдәҶпјҢе…·дҪ“и§ҒзЁӢеәҸгҖӮ
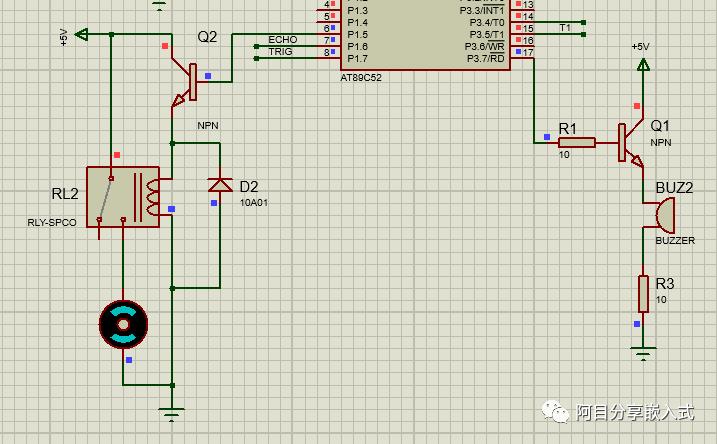
void counter1() interrupt 3{ TH1=0xff; // дёҖдёӘи„үеҶІи§ҰеҸ‘дёҖж¬Ўдёӯж–ӯ TL1=0xff; TF1 = 0; //жё…йҷӨдёӯж–ӯж Үеҝ— if((is_ok==1&&is_st_count ==0)){ //иҝҷжҳҜ第дёҖдёӘи„үеҶІзҡ„иҜқпјҢжү§иЎҢиҝҷдёӘif TR0 = 1; is_st_count =1; st_count = count; puls_num++; // и„үеҶІж•°еҠ 1 } else if((is_ok ==1&&is_st_count ==1 && is_ed_count==0 && (count- st_count) <20)){ //е…¶д»–и„үеҶІжү§иЎҢиҝҷйҮҢ puls_num++; // и„үеҶІж•°еҠ 1 } if((count- st_count) >=20){ //еҲ°иҫҫ1S пјҢеҒңжӯўи®Ўж•° is_ed_count = 1; is_sec = 1; TR0 = 0; TR1 = 0; } }еҲ¶еҠЁжҺ§еҲ¶з”өи·Ҝе’ҢиңӮйёЈеҷЁз”өи·ҜеҺҹзҗҶзұ»дјјпјҢдҪҝз”ЁNPNдёүжһҒз®ЎжҺ§еҲ¶пјҢеҚ•зүҮжңәеңЁеҹәеҹәиҫ“е…Ҙй«ҳз”өе№іпјҢNPNеҜјйҖҡпјҢз”өжңәиҪ¬еҠЁпјҢиңӮйёЈеҷЁе·ҘдҪңпјҢиҫ“е…ҘдҪҺз”ө平他们йғҪдёҚе·ҘдҪңпјҢжҺ§еҲ¶з®ҖеҚ•гҖӮ
е®ҢжҲҗиҝҷеҮ дёӘжЁЎеқ—зҡ„и®ҫи®ЎпјҢе°ұеҸҜд»ҘеҶҷжҺ§еҲ¶йҖ»иҫ‘зҡ„д»Јз ҒдәҶпјҢеҪ“и·қзҰ»е°ҸдәҺйҳҲеҖјж—¶жҺ§еҲ¶жҠҘиӯҰд»ҘеҸҠеҲ¶еҠЁгҖӮ
д»ҝзңҹе’ҢзЁӢеәҸйғҪејҖжәҗдәҶпјҢйңҖиҰҒзҡ„е°ҸдјҷдјҙзӮ№зӮ№е…іжіЁпјҢеҗҺеҸ°еӣһеӨҚвҖң004и¶…еЈ°жіўжөӢи·қжөӢйҖҹвҖқпјҢе°ұеҸҜд»ҘиҺ·еҸ–иө„ж–ҷдәҶ~~
иЎҘе……иҜҙжҳҺдёӢе°Ҹдјҷдјҙзҡ„й—®йўҳпјҢд»ҝзңҹиҪҜ件йңҖиҰҒproteus8.8еҸҠд»ҘдёҠзүҲжң¬пјҢзЁӢеәҸиҪҜ件жҳҜkeil4.6еҸҠд»ҘдёҠзүҲжң¬пјҢжңүй—®йўҳеҸҜз§ҒдҝЎйҳҝзӣ®~
ending~~